The Code
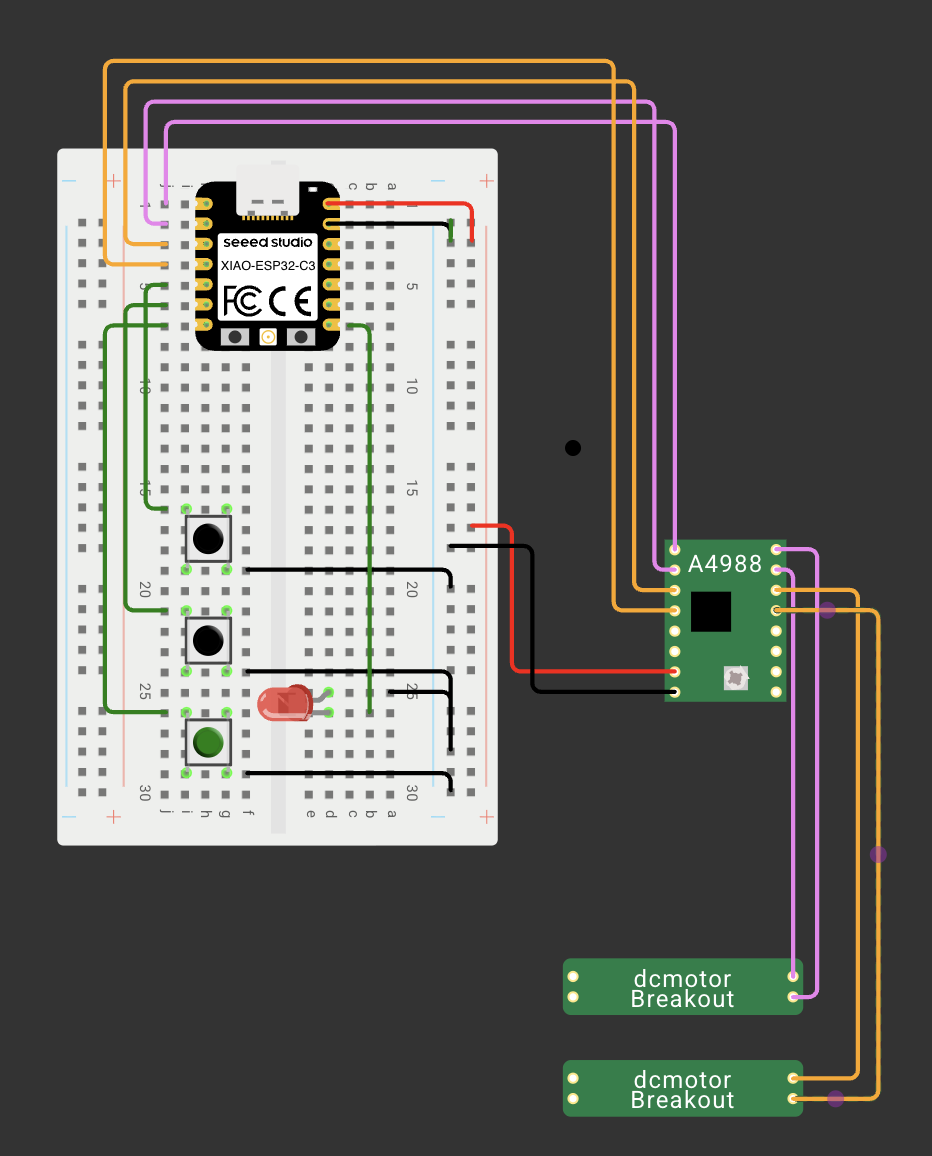
Finally, here's the code. I restructured the class based 2-motor movement code from class but replacing timers with a toggle button associated with each motor. Further, the reverse motor acts as a global toggle for both. As a potential next step, I think having a system where the motors keep moving unless toggled again could be interesting. I think having a 3-state variable for each motor, capturing forward, reverse, and no movement would probably be the best way to do something like this.
// Motors
int B1A = D2;
int B1B = D3;
int A1A = D0;
int A1B = D1;
// Button pins
int BTN_A = D4;
int BTN_B = D5;
int BTN_R = D6;
// Reverse Indicator
int LED = D7;
class Motor{
int A;
int B;
int btn;
public:
Motor(int pA, int pB, int bt){
A = pA;
B = pB;
btn = bt;
pinMode(A, OUTPUT);
pinMode(B, OUTPUT);
pinMode(btn, INPUT_PULLUP);
stop();
}
void update(bool reverseActive) {
bool toMove = (digitalRead(btn) == LOW); // checks if local button is pressed
if (!toMove) {
stop();
} else {
if (reverseActive) backward(); // direction dependent on global reverse button
else forward();
}
}
// forward move
void forward(){
digitalWrite(A, HIGH);
digitalWrite(B, LOW);
}
// backward move
void backward(){
digitalWrite(A, LOW);
digitalWrite(B, HIGH);
}
// stop motor
void stop(){
digitalWrite(A, LOW);
digitalWrite(B, LOW);
}
};
Motor m1(A1A, A1B, BTN_A);
Motor m2(B1A, B1B, BTN_B);
void setup(){
pinMode(BTN_R, INPUT_PULLUP);
pinMode(LED, OUTPUT);
}
void loop(){
bool reverseMode = (digitalRead(BTN_R) == LOW);
digitalWrite(LED, reverseMode);
m1.update(reverseMode);
m2.update(reverseMode);
}