Circuit
Project 09
Made in collaboration with David Ettel
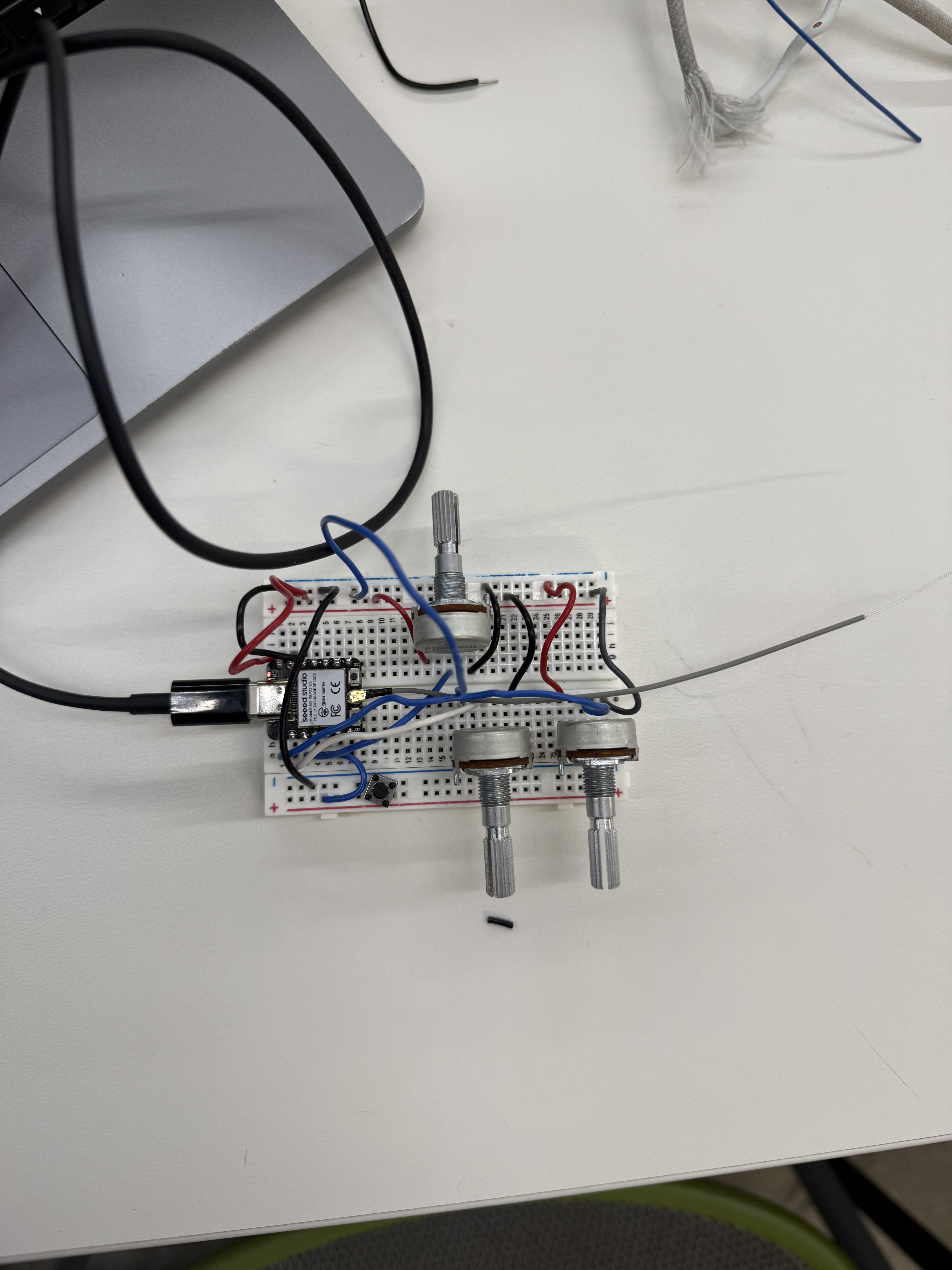
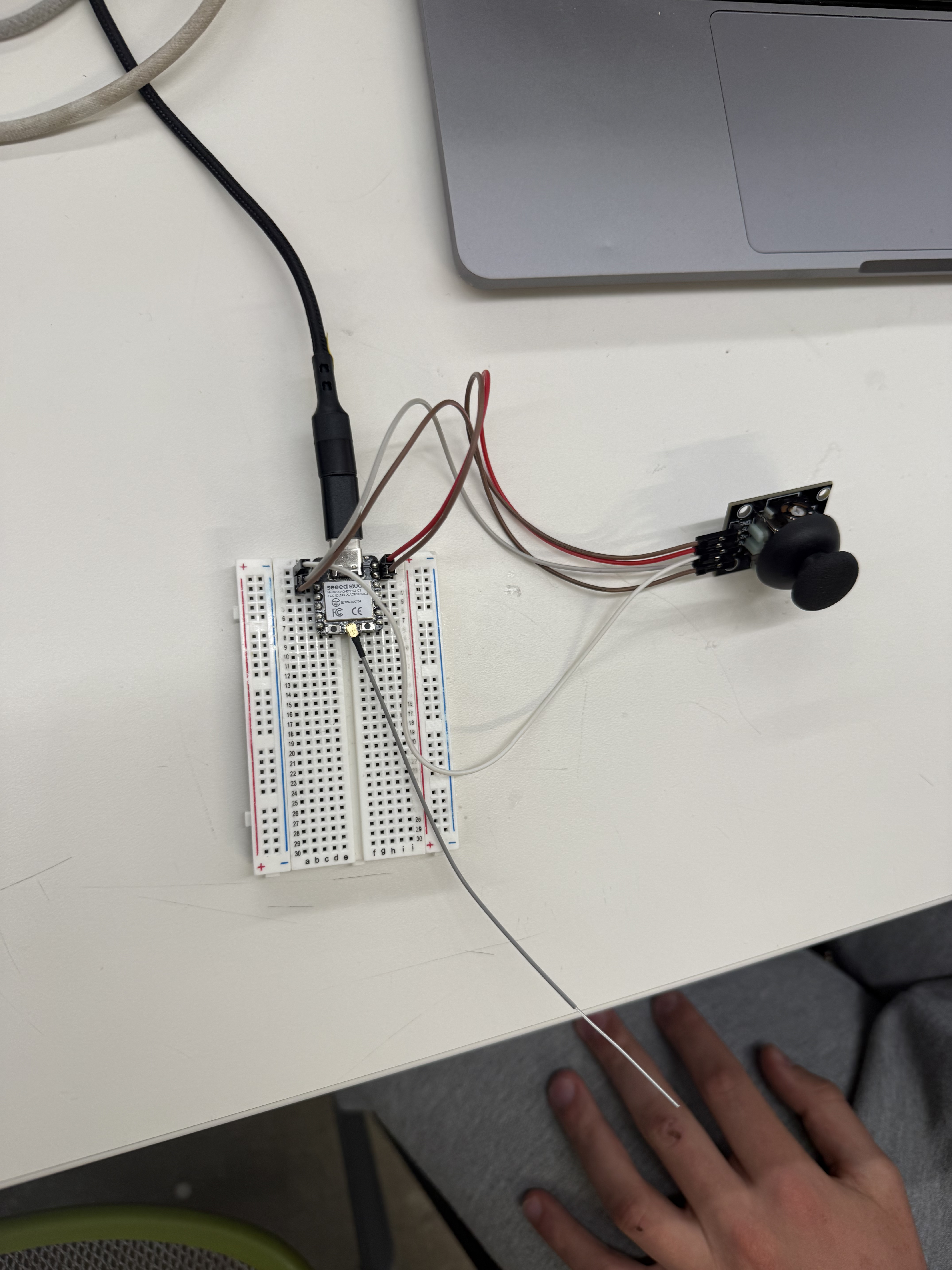
We created a 2-player snake game using ESP Now. Here, one of the users controls the positioning of the fruits while the other user controls the snake. Additionally, the food controller also has access to a special power to dim the game board! We used potentiometers to control the dimming and food placement, discretizing the pot output into width, height, and the brightness range.
#include <WiFi.h>
#include <esp_now.h>
#include <AsyncTCP.h>
#include <ESPAsyncWebServer.h>
#include <ArduinoJson.h>
// ================= SoftAP =================
const char* AP_SSID = "SnakeDisplay";
const char* AP_PASS = "12345678";
const uint8_t WIFI_CHANNEL = 1;
// ================= Servers =================
AsyncWebServer server(80);
AsyncWebSocket ws("/ws");
// ================= Pins =================
const int POT_X_PIN = D0; // physical pot on D0 -> controls Y
const int POT_Y_PIN = D1; // physical pot on D1 -> controls X
const int BRIGHTNESS_POT_PIN = D2; // new pot on D2 -> opacity / brightness
const int BUTTON_PIN = D3; // fruit spawn button
// ================= Game config =================
const int GRID_W = 20;
const int GRID_H = 20;
const int MAX_SNAKE = 225;
const unsigned long MOVE_INTERVAL = 220;
const unsigned long FRUIT_TIMEOUT = 10000;
const unsigned long PREVIEW_BROADCAST_INTERVAL = 180;
struct Point {
int x;
int y;
};
Point snake[MAX_SNAKE];
int snakeLen = 3;
Point fruits[2] = {{-1, -1}, {-1, -1}};
int activeFruitCount = 0;
unsigned long fruitSpawnTime = 0;
int previewX = 0;
int previewY = 0;
unsigned long lastPreviewBroadcast = 0;
int lastBroadcastPreviewX = -1;
int lastBroadcastPreviewY = -1;
int brightnessPercent = 100;
int lastBroadcastBrightness = -1;
enum Direction {
UP,
DOWN,
LEFT,
RIGHT
};
Direction currentDir = RIGHT;
Direction nextDir = RIGHT;
bool gameOver = false;
int score = 0;
unsigned long lastMoveTime = 0;
bool lastButtonState = HIGH;
// ================= ESP-NOW packet =================
typedef struct ControlPacket {
uint8_t type; // 1 = direction
uint8_t direction; // 0=up,1=down,2=left,3=right
uint32_t seq;
} ControlPacket;
volatile bool hasPendingDir = false;
volatile uint8_t pendingDir = RIGHT;
// ================= Web page =================
const char INDEX_HTML[] PROGMEM = R"rawliteral(
<!DOCTYPE html>
<html>
<head>
<meta name="viewport" content="width=device-width, initial-scale=1">
<title>Snake Game</title>
<style>
body {
font-family: Arial, sans-serif;
background: #111;
color: white;
text-align: center;
margin: 0;
padding: 20px;
}
canvas {
background: #222;
border: 2px solid #666;
margin-top: 10px;
width: min(90vw, 500px);
height: min(90vw, 500px);
image-rendering: pixelated;
}
.info {
margin-top: 10px;
font-size: 18px;
}
.preview {
margin-top: 8px;
font-size: 17px;
color: #bbb;
}
button {
margin-top: 12px;
padding: 10px 16px;
font-size: 16px;
}
</style>
</head>
<body>
<h2>Snake</h2>
<div>Join Wi-Fi: <b>SnakeDisplay</b></div>
<div>Open: <b>http://192.168.4.1</b></div>
<canvas id="game" width="500" height="500"></canvas>
<div class="info" id="info">Loading...</div>
<div class="preview" id="preview">Next fruit: X --, Y --</div>
<button onclick="restartGame()">Restart</button>
<script>
const GRID_W = 20;
const GRID_H = 20;
const canvas = document.getElementById("game");
const ctx = canvas.getContext("2d");
const info = document.getElementById("info");
const previewText = document.getElementById("preview");
const cellW = canvas.width / GRID_W;
const cellH = canvas.height / GRID_H;
let state = null;
const ws = new WebSocket(`ws://${location.host}/ws`);
ws.onmessage = (event) => {
const msg = JSON.parse(event.data);
if (msg.type === "state") {
state = msg;
draw();
}
};
function restartGame() {
ws.send(JSON.stringify({type: "restart"}));
}
function rgba(r, g, b, a) {
return `rgba(${r}, ${g}, ${b}, ${a})`;
}
function draw() {
if (!state) return;
const alpha = Math.max(0.03, Math.min(1.0, (state.brightnessPercent || 100) / 100));
ctx.clearRect(0, 0, canvas.width, canvas.height);
// background board
ctx.fillStyle = rgba(34, 34, 34, Math.max(0.03, alpha));
ctx.fillRect(0, 0, canvas.width, canvas.height);
// grid
for (let y = 0; y < GRID_H; y++) {
for (let x = 0; x < GRID_W; x++) {
ctx.strokeStyle = rgba(90, 90, 90, Math.max(0.03, alpha));
ctx.strokeRect(x * cellW, y * cellH, cellW, cellH);
}
}
// preview placement
if (!state.gameOver) {
ctx.strokeStyle = state.preview.onSnake || state.preview.onFruit
? rgba(255, 136, 68, Math.max(0.03, alpha))
: rgba(102, 170, 255, Math.max(0.03, alpha));
ctx.lineWidth = 2;
ctx.strokeRect(
state.preview.x * cellW + 4,
state.preview.y * cellH + 4,
cellW - 8,
cellH - 8
);
}
// snake
for (let i = 0; i < state.snake.length; i++) {
const s = state.snake[i];
ctx.fillStyle = i === 0
? rgba(0, 255, 136, Math.max(0.03, alpha))
: rgba(68, 204, 68, Math.max(0.03, alpha));
ctx.fillRect(s[0] * cellW + 2, s[1] * cellH + 2, cellW - 4, cellH - 4);
}
// fruits
if (state.fruits) {
for (const f of state.fruits) {
ctx.fillStyle = rgba(255, 68, 68, Math.max(0.03, alpha));
ctx.beginPath();
ctx.arc(
f.x * cellW + cellW / 2,
f.y * cellH + cellH / 2,
Math.min(cellW, cellH) / 3,
0,
Math.PI * 2
);
ctx.fill();
}
}
let text = `Score: ${state.score} | Fruits: ${state.activeFruitCount}`;
if (state.activeFruitCount > 0 && !state.gameOver) {
text += ` | Timer: ${state.timeLeft}s`;
}
if (state.gameOver) {
text += ` | GAME OVER`;
}
info.textContent = text;
previewText.textContent =
`Next fruit: X ${state.preview.x}, Y ${state.preview.y}` +
(state.preview.onSnake ? " (on snake)" : "") +
(state.preview.onFruit ? " (on fruit)" : "") +
` | Brightness: ${state.brightnessPercent}%`;
// large game over overlay
if (state.gameOver) {
ctx.fillStyle = "rgba(0, 0, 0, 0.55)";
ctx.fillRect(0, 0, canvas.width, canvas.height);
ctx.textAlign = "center";
ctx.textBaseline = "middle";
ctx.fillStyle = "rgba(255, 70, 70, 0.98)";
ctx.font = "bold 56px Arial";
ctx.fillText("GAME OVER", canvas.width / 2, canvas.height / 2 - 18);
ctx.fillStyle = "rgba(255, 255, 255, 0.98)";
ctx.font = "bold 22px Arial";
ctx.fillText(`Score: ${state.score}`, canvas.width / 2, canvas.height / 2 + 34);
}
}
</script>
</body>
</html>
)rawliteral";
// ================= Helpers =================
void startSoftAP() {
WiFi.mode(WIFI_AP_STA);
bool ok = WiFi.softAP(AP_SSID, AP_PASS, WIFI_CHANNEL, 0, 4);
if (!ok) {
Serial.println("SoftAP start failed");
while (true) delay(1000);
}
Serial.println("SoftAP started");
Serial.print("AP IP: ");
Serial.println(WiFi.softAPIP());
Serial.print("AP MAC: ");
Serial.println(WiFi.softAPmacAddress());
}
void setupEspNow() {
if (esp_now_init() != ESP_OK) {
Serial.println("ESP-NOW init failed");
while (true) delay(1000);
}
esp_now_register_recv_cb([](const esp_now_recv_info_t *recv_info, const uint8_t *incomingData, int len) {
if (len != sizeof(ControlPacket)) return;
ControlPacket pkt;
memcpy(&pkt, incomingData, sizeof(pkt));
if (pkt.type == 1 && pkt.direction <= 3) {
pendingDir = pkt.direction;
hasPendingDir = true;
}
});
Serial.println("ESP-NOW ready");
}
int readAveraged(int pin, int samples = 4) {
long total = 0;
for (int i = 0; i < samples; i++) {
total += analogRead(pin);
}
return total / samples;
}
int mapToGrid(int raw, int gridSize) {
int v = (raw * gridSize) / 4096;
if (v < 0) v = 0;
if (v >= gridSize) v = gridSize - 1;
return v;
}
int mapBrightnessPercent(int raw) {
int pct = 3 + ((long)raw * 97) / 4095; // 3% to 100%
if (pct < 3) pct = 3;
if (pct > 100) pct = 100;
return pct;
}
bool pointEquals(Point a, Point b) {
return a.x == b.x && a.y == b.y;
}
bool fruitContains(int x, int y) {
for (int i = 0; i < activeFruitCount; i++) {
if (fruits[i].x == x && fruits[i].y == y) return true;
}
return false;
}
bool snakeContains(int x, int y) {
for (int i = 0; i < snakeLen; i++) {
if (snake[i].x == x && snake[i].y == y) return true;
}
return false;
}
bool isOpposite(Direction a, Direction b) {
return (a == UP && b == DOWN) ||
(a == DOWN && b == UP) ||
(a == LEFT && b == RIGHT) ||
(a == RIGHT && b == LEFT);
}
void updatePreviewFromPots() {
int rawFromD0 = readAveraged(POT_X_PIN);
int rawFromD1 = readAveraged(POT_Y_PIN);
int rawBrightness = readAveraged(BRIGHTNESS_POT_PIN);
// swapped intentionally:
// D0 controls Y
// D1 controls X
previewX = mapToGrid(rawFromD1, GRID_W);
previewY = mapToGrid(rawFromD0, GRID_H);
brightnessPercent = mapBrightnessPercent(rawBrightness);
}
void resetGame() {
snakeLen = 3;
snake[0] = {7, 7};
snake[1] = {6, 7};
snake[2] = {5, 7};
currentDir = RIGHT;
nextDir = RIGHT;
pendingDir = RIGHT;
hasPendingDir = false;
fruits[0] = {-1, -1};
fruits[1] = {-1, -1};
activeFruitCount = 0;
fruitSpawnTime = 0;
score = 0;
gameOver = false;
lastMoveTime = millis();
}
void spawnFruitFromPots() {
if (gameOver) return;
updatePreviewFromPots();
int fx = previewX;
int fy = previewY;
fx = constrain(fx, 0, GRID_W - 1);
fy = constrain(fy, 0, GRID_H - 1);
if (snakeContains(fx, fy)) {
Serial.println("Fruit rejected: on snake");
return;
}
if (fruitContains(fx, fy)) {
Serial.println("Fruit rejected: already a fruit there");
return;
}
if (activeFruitCount >= 2) {
Serial.println("Fruit rejected: already 2 active fruits");
return;
}
fruits[activeFruitCount] = {fx, fy};
activeFruitCount++;
// shared timer resets whenever a new fruit is placed
fruitSpawnTime = millis();
Serial.printf("Fruit spawned at (%d, %d). Active fruits: %d\n", fx, fy, activeFruitCount);
}
void moveSnake() {
if (gameOver) return;
if (hasPendingDir) {
Direction candidate = (Direction)pendingDir;
if (!isOpposite(currentDir, candidate)) {
nextDir = candidate;
}
hasPendingDir = false;
}
if (!isOpposite(currentDir, nextDir)) {
currentDir = nextDir;
}
Point newHead = snake[0];
switch (currentDir) {
case UP: newHead.y--; break;
case DOWN: newHead.y++; break;
case LEFT: newHead.x--; break;
case RIGHT: newHead.x++; break;
}
if (newHead.x < 0) newHead.x = GRID_W - 1;
if (newHead.x >= GRID_W) newHead.x = 0;
if (newHead.y < 0) newHead.y = GRID_H - 1;
if (newHead.y >= GRID_H) newHead.y = 0;
for (int i = 0; i < snakeLen; i++) {
if (snake[i].x == newHead.x && snake[i].y == newHead.y) {
gameOver = true;
return;
}
}
int eatenIndex = -1;
for (int i = 0; i < activeFruitCount; i++) {
if (pointEquals(newHead, fruits[i])) {
eatenIndex = i;
break;
}
}
bool ateFruit = (eatenIndex != -1);
if (ateFruit) {
if (snakeLen < MAX_SNAKE) {
for (int i = snakeLen; i > 0; i--) {
snake[i] = snake[i - 1];
}
snake[0] = newHead;
snakeLen++;
}
for (int i = eatenIndex; i < activeFruitCount - 1; i++) {
fruits[i] = fruits[i + 1];
}
fruits[activeFruitCount - 1] = {-1, -1};
activeFruitCount--;
score++;
} else {
for (int i = snakeLen - 1; i > 0; i--) {
snake[i] = snake[i - 1];
}
snake[0] = newHead;
}
}
int computeTimeLeftSeconds() {
if (activeFruitCount <= 0) return 0;
long remaining = (long)FRUIT_TIMEOUT - (long)(millis() - fruitSpawnTime);
if (remaining <= 0) return 0;
return (remaining + 999) / 1000;
}
void checkFruitTimeout() {
if (activeFruitCount == 0 || gameOver) return;
if (computeTimeLeftSeconds() <= 0) {
gameOver = true;
Serial.println("Game over: fruit timeout");
}
}
void broadcastState() {
JsonDocument doc;
doc["type"] = "state";
doc["score"] = score;
doc["gameOver"] = gameOver;
doc["activeFruitCount"] = activeFruitCount;
doc["brightnessPercent"] = brightnessPercent;
JsonObject previewObj = doc["preview"].to<JsonObject>();
previewObj["x"] = constrain(previewX, 0, GRID_W - 1);
previewObj["y"] = constrain(previewY, 0, GRID_H - 1);
previewObj["onSnake"] = snakeContains(previewX, previewY);
previewObj["onFruit"] = fruitContains(previewX, previewY);
doc["timeLeft"] = computeTimeLeftSeconds();
JsonArray fruitsArr = doc["fruits"].to<JsonArray>();
for (int i = 0; i < activeFruitCount; i++) {
JsonObject f = fruitsArr.add<JsonObject>();
f["x"] = fruits[i].x;
f["y"] = fruits[i].y;
}
JsonArray snakeArr = doc["snake"].to<JsonArray>();
for (int i = 0; i < snakeLen; i++) {
JsonArray seg = snakeArr.add<JsonArray>();
seg.add(snake[i].x);
seg.add(snake[i].y);
}
String out;
serializeJson(doc, out);
ws.textAll(out);
}
void handleClientMessage(const String& msg) {
JsonDocument doc;
DeserializationError err = deserializeJson(doc, msg);
if (err) return;
const char* type = doc["type"];
if (!type) return;
if (strcmp(type, "restart") == 0) {
resetGame();
broadcastState();
}
}
void onWsEvent(AsyncWebSocket *server,
AsyncWebSocketClient *client,
AwsEventType type,
void *arg,
uint8_t *data,
size_t len) {
if (type == WS_EVT_CONNECT) {
broadcastState();
} else if (type == WS_EVT_DATA) {
AwsFrameInfo *info = (AwsFrameInfo*)arg;
if (info->final && info->index == 0 && info->len == len && info->opcode == WS_TEXT) {
String msg;
msg.reserve(len);
for (size_t i = 0; i < len; i++) {
msg += (char)data[i];
}
handleClientMessage(msg);
}
}
}
void setup() {
Serial.begin(115200);
delay(1000);
pinMode(BUTTON_PIN, INPUT_PULLUP);
analogReadResolution(12);
resetGame();
updatePreviewFromPots();
startSoftAP();
setupEspNow();
ws.onEvent(onWsEvent);
server.addHandler(&ws);
server.on("/", HTTP_GET, [](AsyncWebServerRequest *request) {
request->send(200, "text/html", INDEX_HTML);
});
server.begin();
Serial.println("Hybrid ESP-NOW + web display ready");
Serial.println("Join Wi-Fi: SnakeDisplay");
Serial.println("Open: http://192.168.4.1");
}
void loop() {
updatePreviewFromPots();
unsigned long now = millis();
if (now - lastPreviewBroadcast >= PREVIEW_BROADCAST_INTERVAL) {
lastPreviewBroadcast = now;
bool previewChanged = (previewX != lastBroadcastPreviewX || previewY != lastBroadcastPreviewY);
bool brightnessChanged = (brightnessPercent != lastBroadcastBrightness);
if (previewChanged || brightnessChanged) {
broadcastState();
lastBroadcastPreviewX = previewX;
lastBroadcastPreviewY = previewY;
lastBroadcastBrightness = brightnessPercent;
}
}
bool buttonState = digitalRead(BUTTON_PIN);
if (lastButtonState == HIGH && buttonState == LOW) {
spawnFruitFromPots();
broadcastState();
delay(20);
}
lastButtonState = buttonState;
if (!gameOver && activeFruitCount > 0) {
checkFruitTimeout();
if (gameOver) {
broadcastState();
}
}
if (!gameOver && now - lastMoveTime >= MOVE_INTERVAL) {
lastMoveTime = now;
moveSnake();
checkFruitTimeout(); // catches exact timeout edge right after movement too
broadcastState();
}
ws.cleanupClients();
}#include <WiFi.h>
#include <esp_now.h>
#include <esp_wifi.h> // needed for channel setting
// ================= Pins =================
const int JOY_X_PIN = A0;
const int JOY_Y_PIN = A1;
// ================= Thresholds =================
// You may tweak these based on your joystick
const int LOW_THRESH = 3000;
const int HIGH_THRESH = 3900;
// ================= ESP-NOW =================
const uint8_t WIFI_CHANNEL = 1; // MUST match master
uint8_t broadcastAddress[] = {0xFF,0xFF,0xFF,0xFF,0xFF,0xFF};
// Packet structure (must match master)
typedef struct ControlPacket {
uint8_t type; // 1 = direction
uint8_t direction; // 0=up,1=down,2=left,3=right
uint32_t seq;
} ControlPacket;
uint32_t seqNum = 0;
int lastDir = -1;
// ================= Read joystick =================
int readDirection() {
int x = analogRead(JOY_X_PIN);
int y = analogRead(JOY_Y_PIN);
// Debug (optional)
//Serial.printf("x=%d y=%d\n", x, y);
if (y < LOW_THRESH) return 0; // UP
if (y > HIGH_THRESH) return 1; // DOWN
if (x < LOW_THRESH) return 2; // LEFT
if (x > HIGH_THRESH) return 3; // RIGHT
return -1;
}
// ================= Setup ESP-NOW =================
void setupEspNow() {
WiFi.mode(WIFI_STA);
// Force channel to match master SoftAP
esp_wifi_set_promiscuous(true);
esp_wifi_set_channel(WIFI_CHANNEL, WIFI_SECOND_CHAN_NONE);
esp_wifi_set_promiscuous(false);
if (esp_now_init() != ESP_OK) {
Serial.println("ESP-NOW init failed");
while (true) delay(1000);
}
esp_now_peer_info_t peerInfo = {};
memcpy(peerInfo.peer_addr, broadcastAddress, 6);
peerInfo.channel = WIFI_CHANNEL;
peerInfo.encrypt = false;
if (esp_now_add_peer(&peerInfo) != ESP_OK) {
Serial.println("Failed to add peer");
while (true) delay(1000);
}
Serial.println("ESP-NOW ready (joystick)");
}
// ================= Setup =================
void setup() {
Serial.begin(115200);
delay(1000);
analogReadResolution(12);
setupEspNow();
}
// ================= Loop =================
void loop() {
int dir = readDirection();
if (dir != -1 && dir != lastDir) {
ControlPacket pkt;
pkt.type = 1;
pkt.direction = dir;
pkt.seq = seqNum++;
esp_now_send(broadcastAddress, (uint8_t*)&pkt, sizeof(pkt));
Serial.print("Sent dir: ");
Serial.println(dir);
lastDir = dir;
}
// Reset when joystick returns to neutral
if (dir == -1) {
lastDir = -1;
}
delay(20);
}