The Process
The Starting Point:
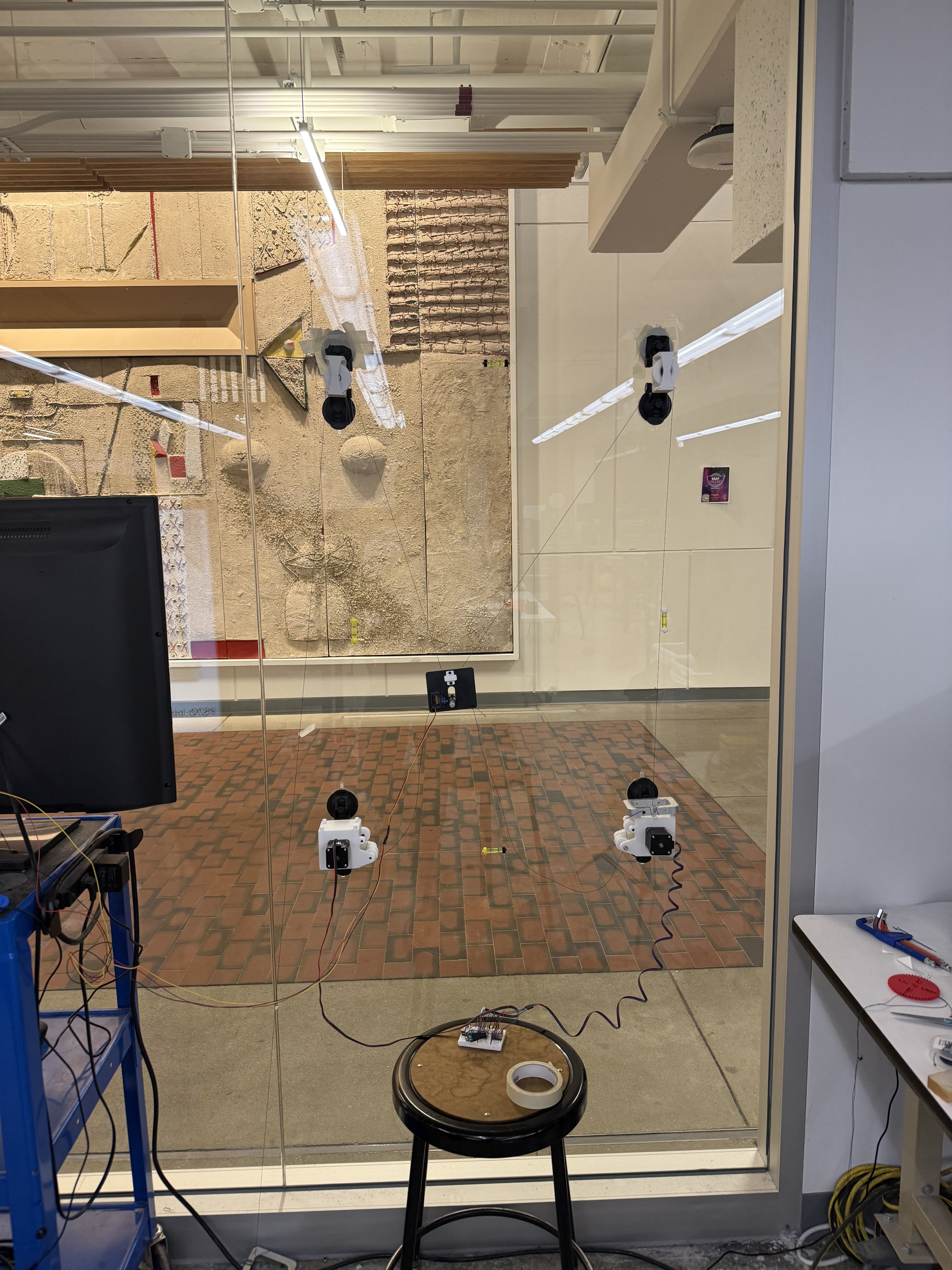
Bobby already had the pulley system designed and assembled when we started. So the first several hours for use were spent tangling and untangling the strings and understanding the system.
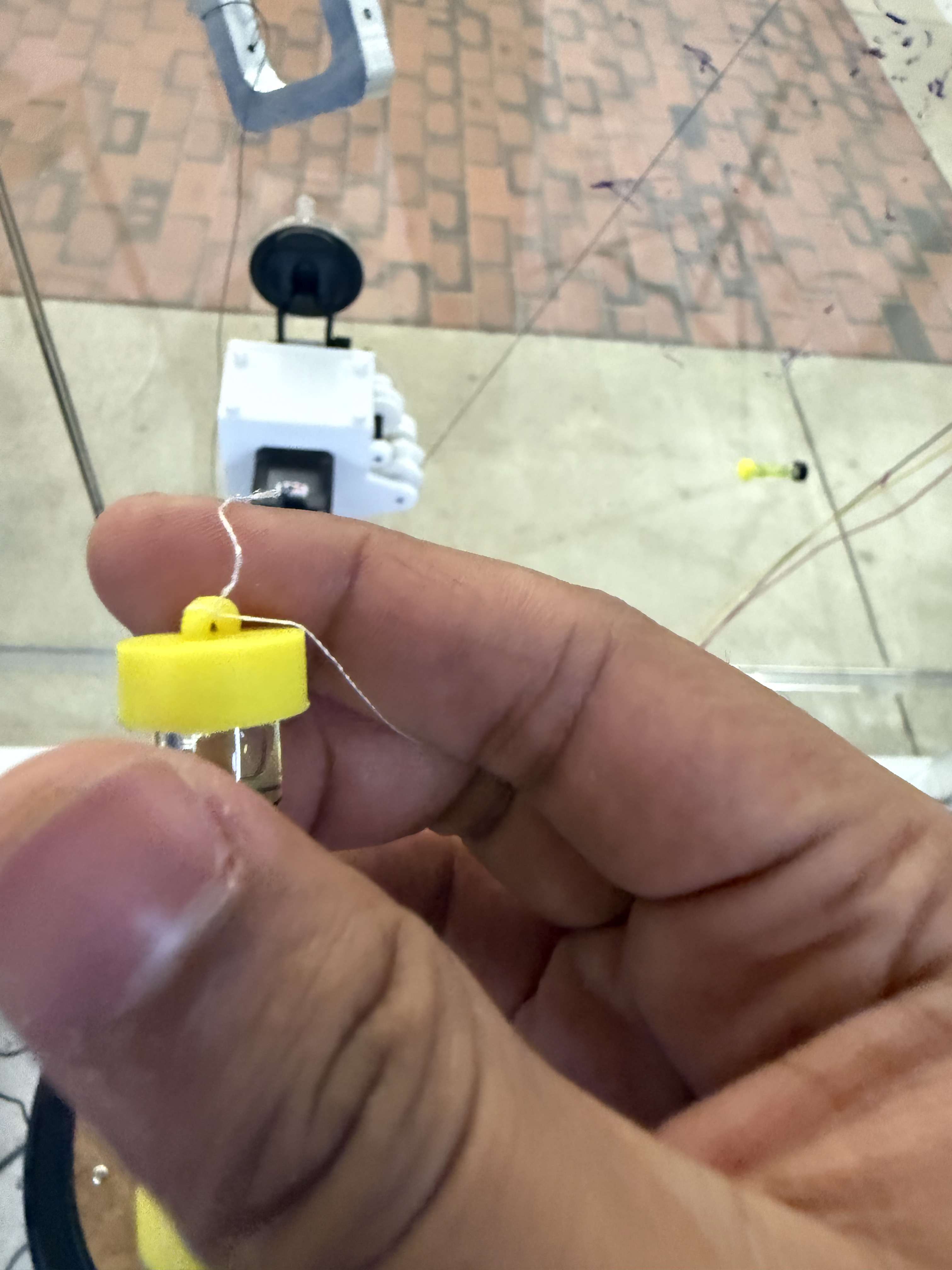
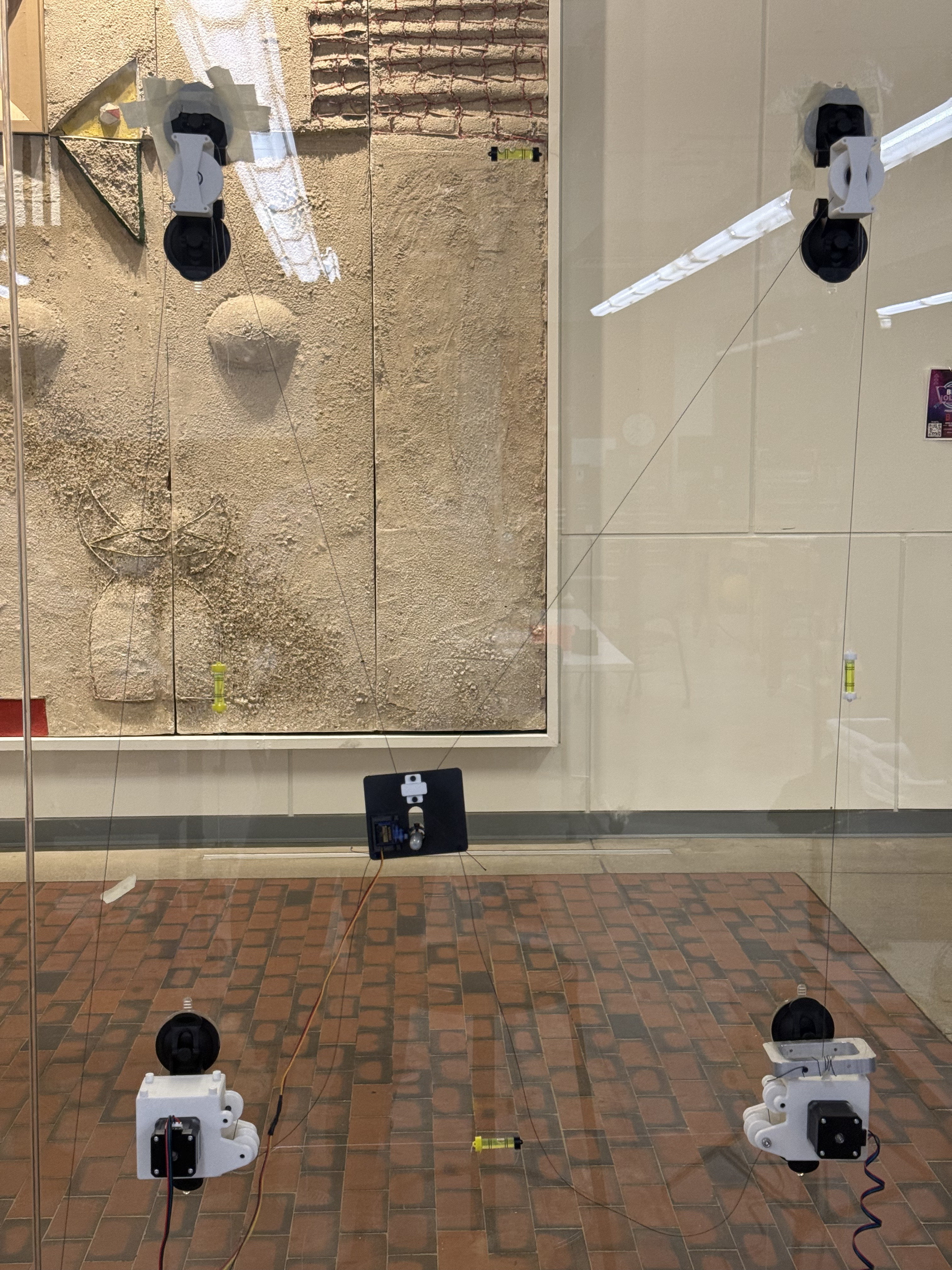
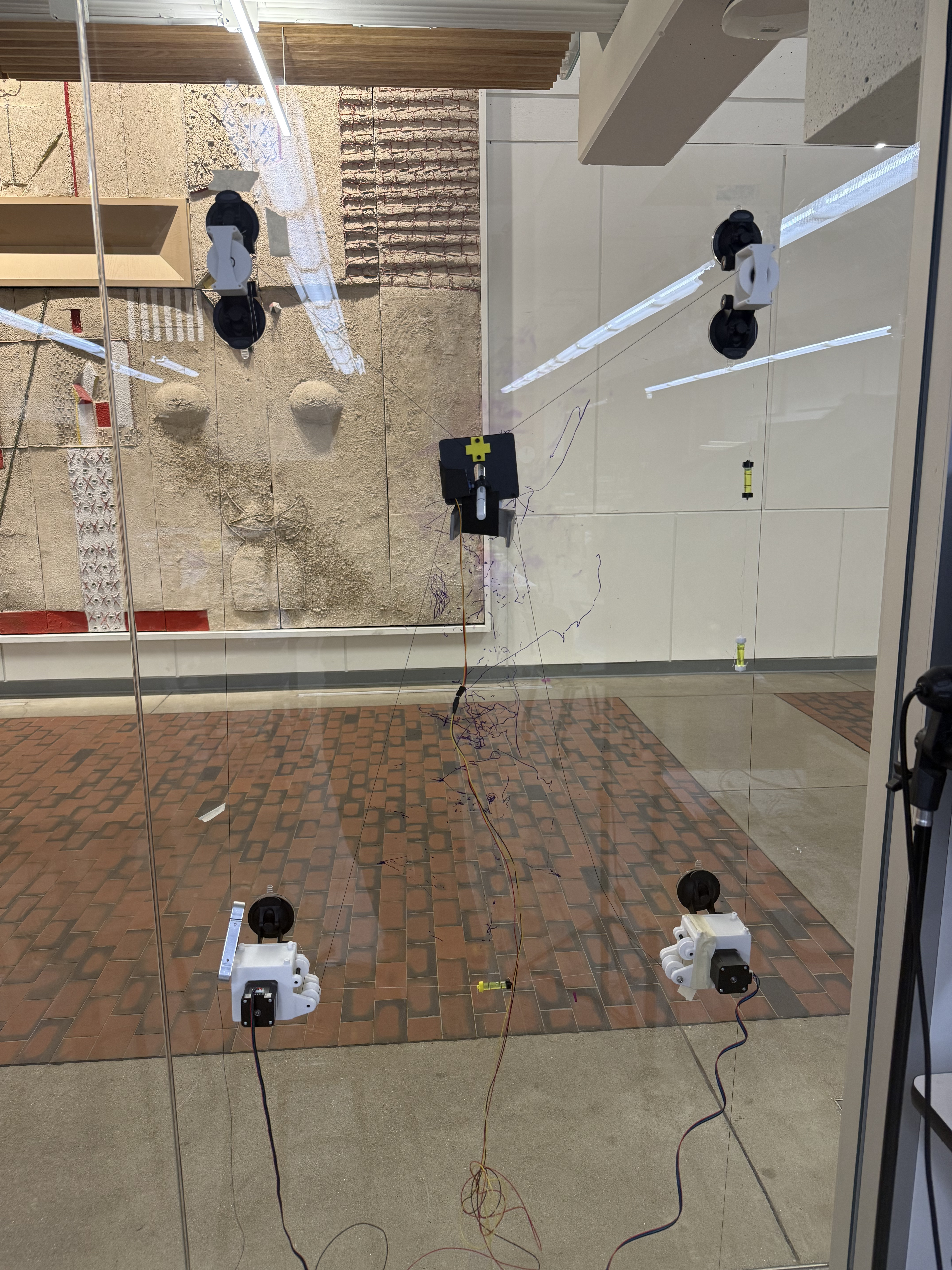
Constraining the system : The first real problem we ran into was figuring out how to constrain the system. In its current form, the pulleys and the motor mounts were not constrained with regards to size in any way as visible in picture 1.1 For this, we decided to buy small cylindrical levels things and designed small caps for them to constrain right angles and constant dimensions (see picture 1.2). We made the stupid mistake of not designing the caps for the vertical version so the angles are only impactful horizontally. But this gave us a reliable parallelogram (same size constrained through string size) and we eyeballed the "rectangleness". This was really helpful in callibration.
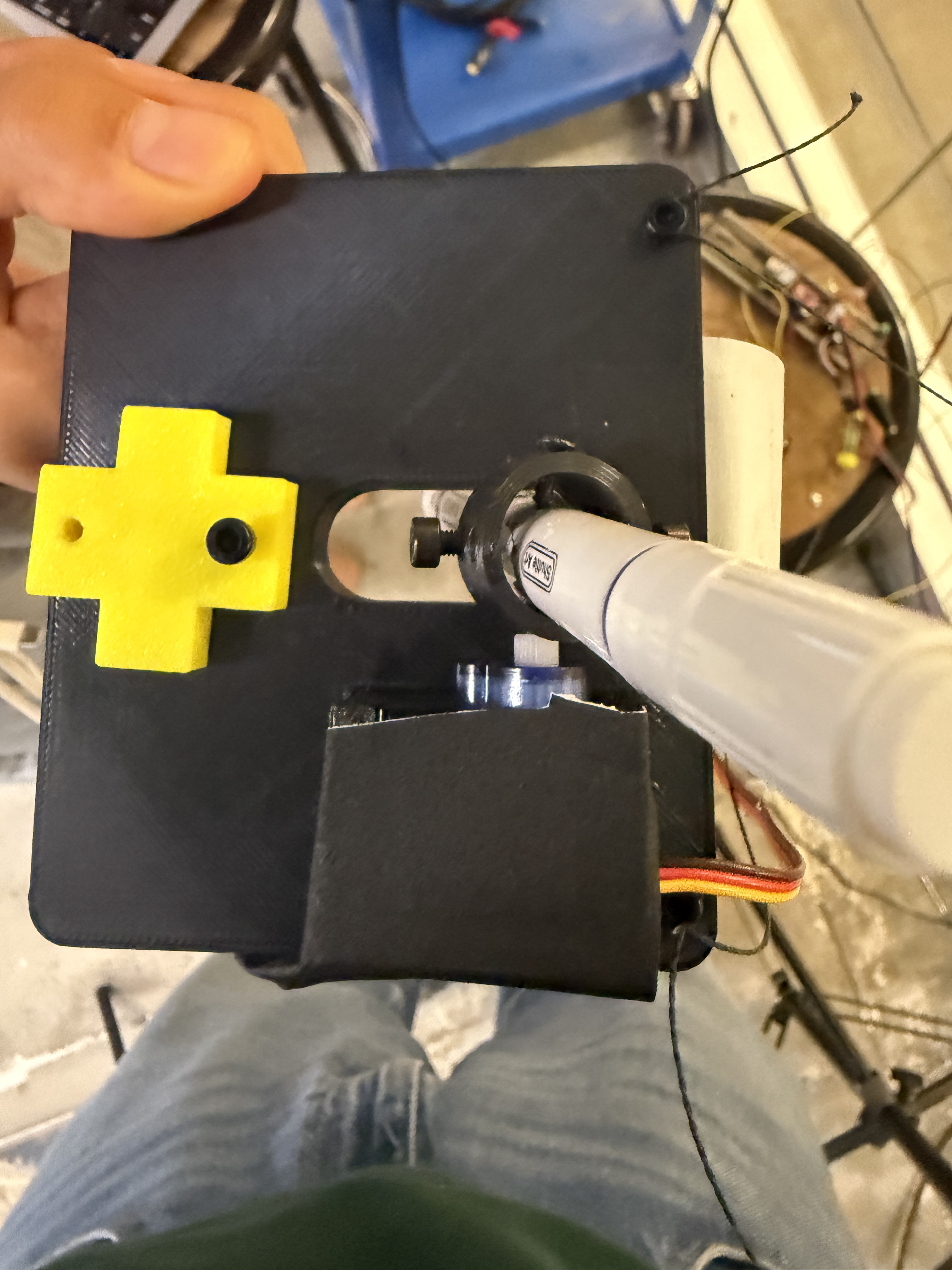
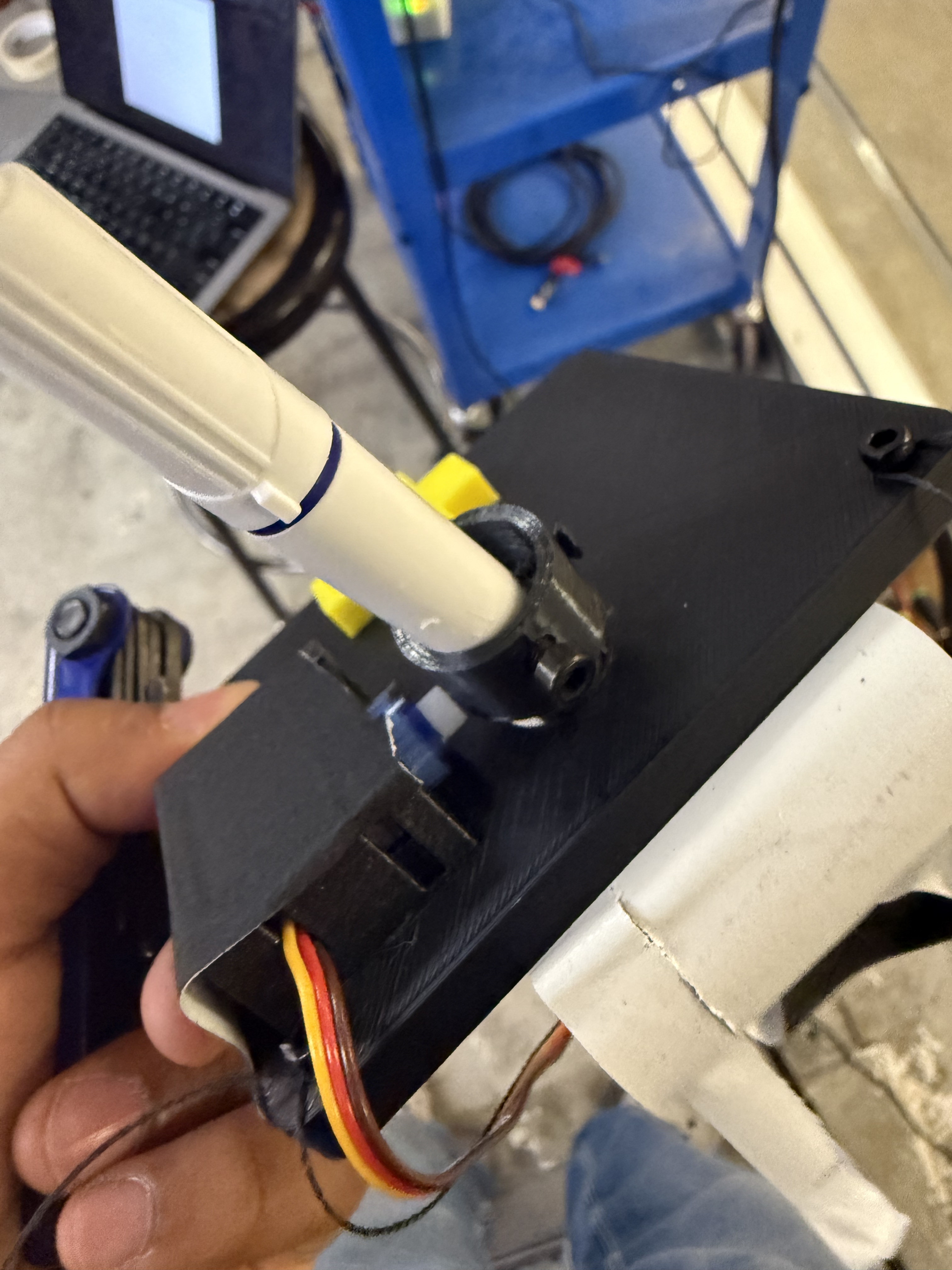
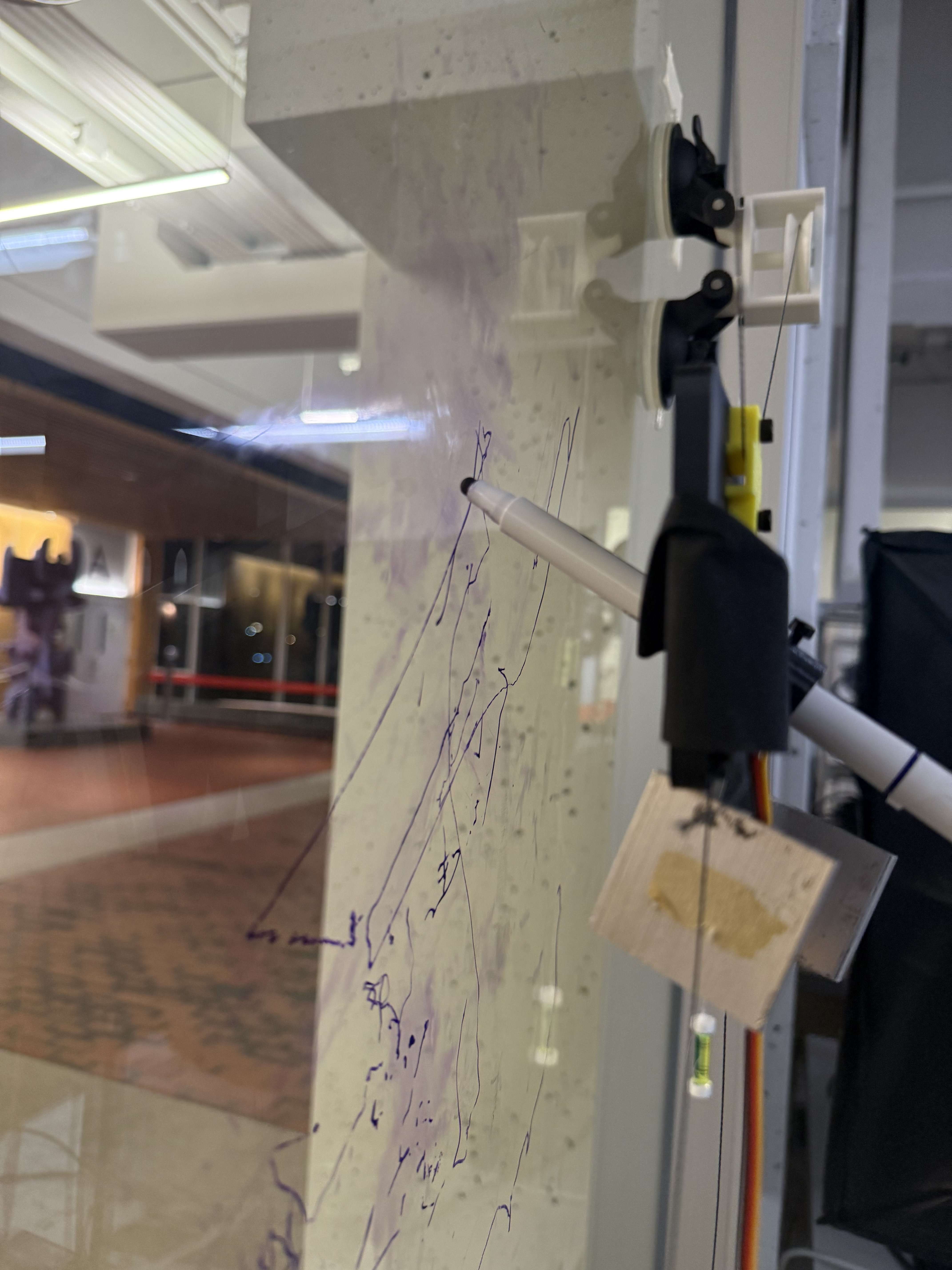
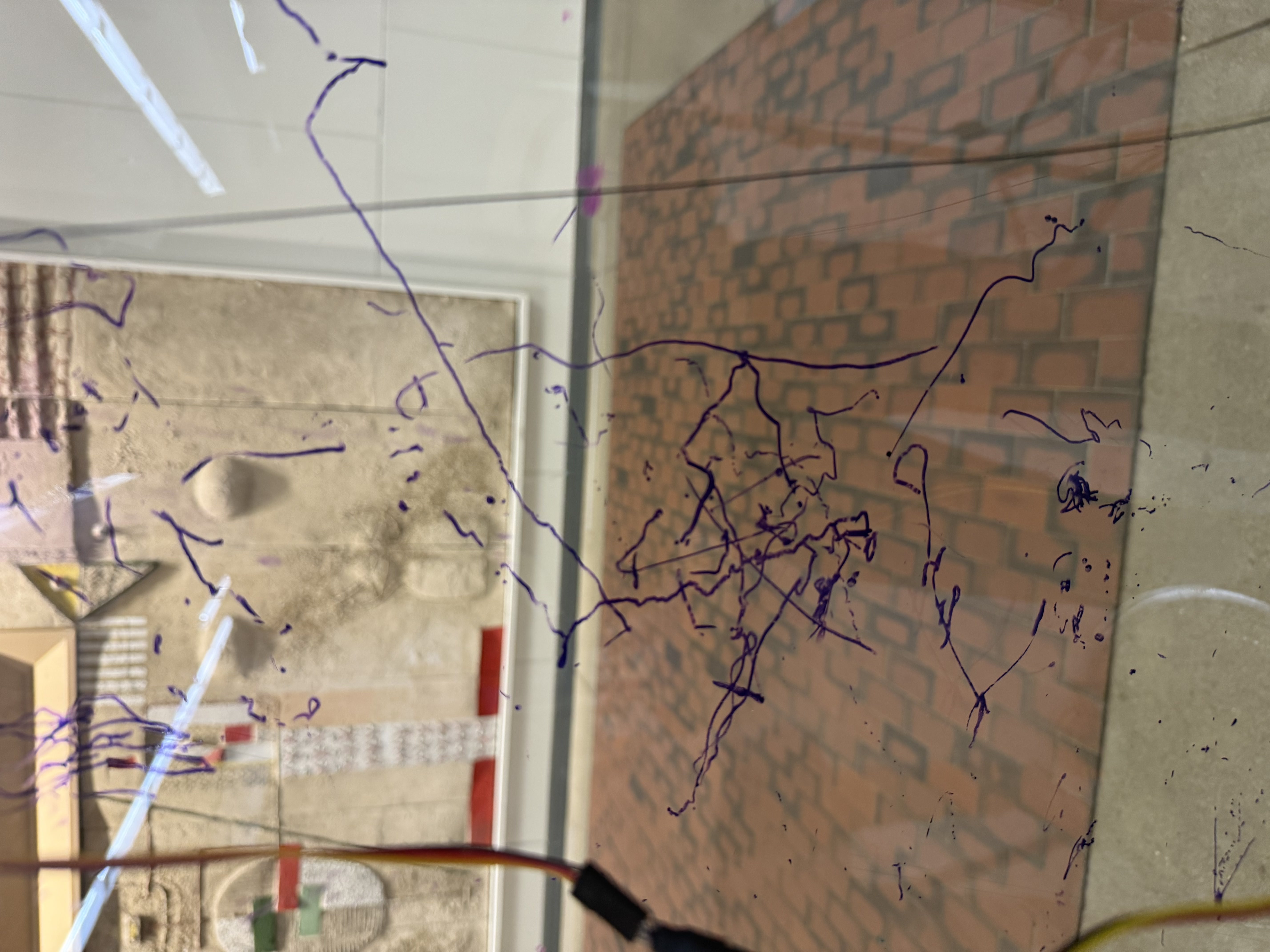
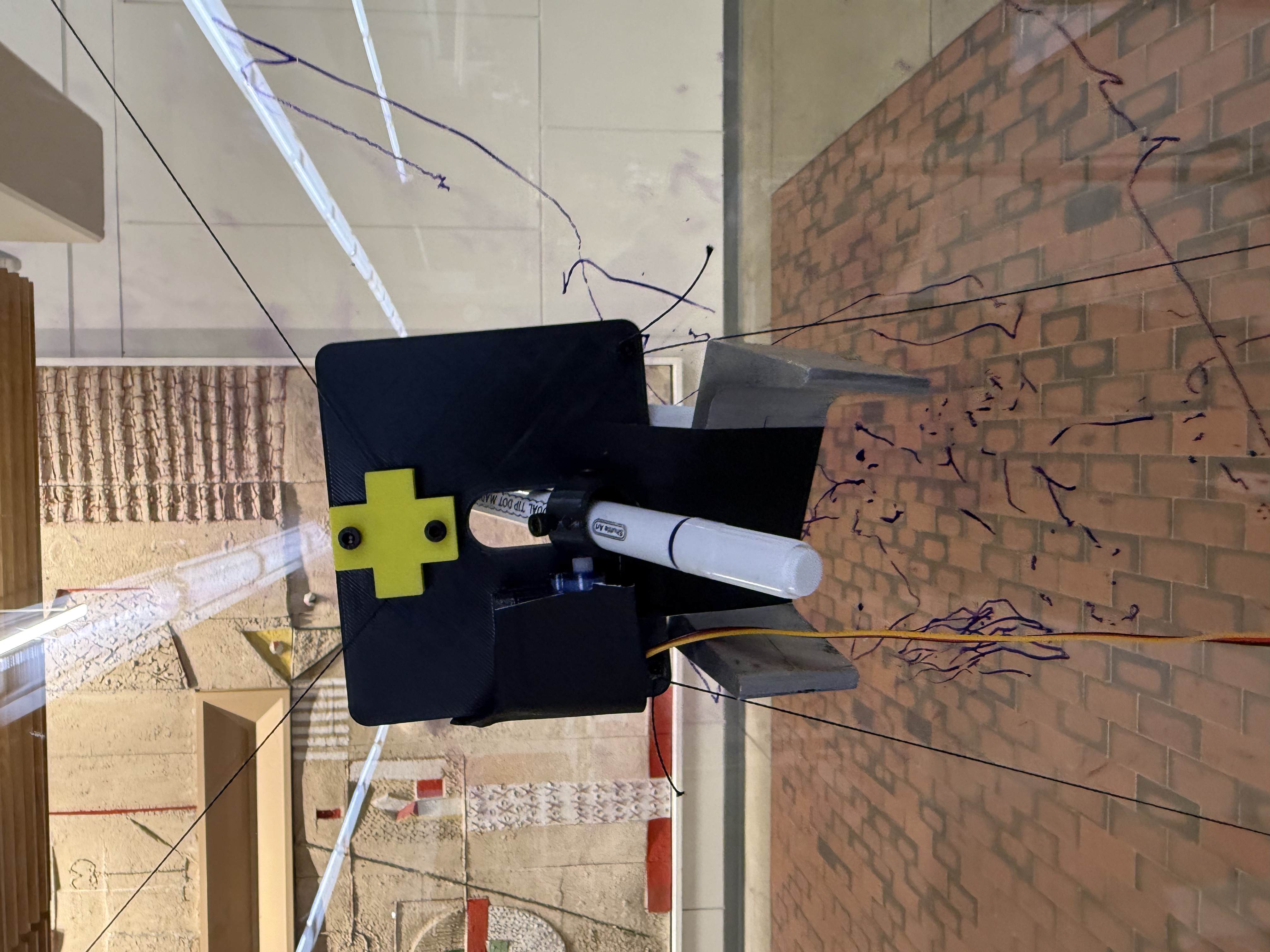
Pen Stand : We went through 3 iterations of the pen stand (2 of them are visible in 2.2 and 2.5). The latter did not work because here in the writing position, the pen was in the air held by a servo motor. The servo unfortunately was not strong enough to stop the pen from just vibrating a lot. This is visible in some of the more jagged lines on the wall. We swapped it out for the system in 2.2 because that way the pen rests on the stand while writing, giving more support. Further, it is connected by a ring that uses M2 and M3 screws to connect to the servo and the pen. Definitely does hurt the pen lol but it is solid and easy to swap!
Friction and Counter Balancing: The pen stand was very slow in adjusting to slack in the system when the bottom motor released string. This was because of friction with the string in the free moving loop at the top. Further, the system struggled to go to the bottom due to the considerable weight on the edges. To counter these, we did 2 things respectively. We did 2 things to counter this, first we added extra weight to the pen stand making it easier for the pen to move down. For upwards movement, we redesigned the loop on the pen stand to be more circular, to reduce friction. This is visible in 2.4. These steps generally made the motion much smoother.
Wires and more Wires: Functioning out of a breadboard for the longest time, we gave up on Kassia's great advice at 6am on the day of presentations. What followed was some very sleepy soldering but it worked! Didn't have to worry about wires once after that so that was great. The sleep deprivation did lead to some shabby solders though.
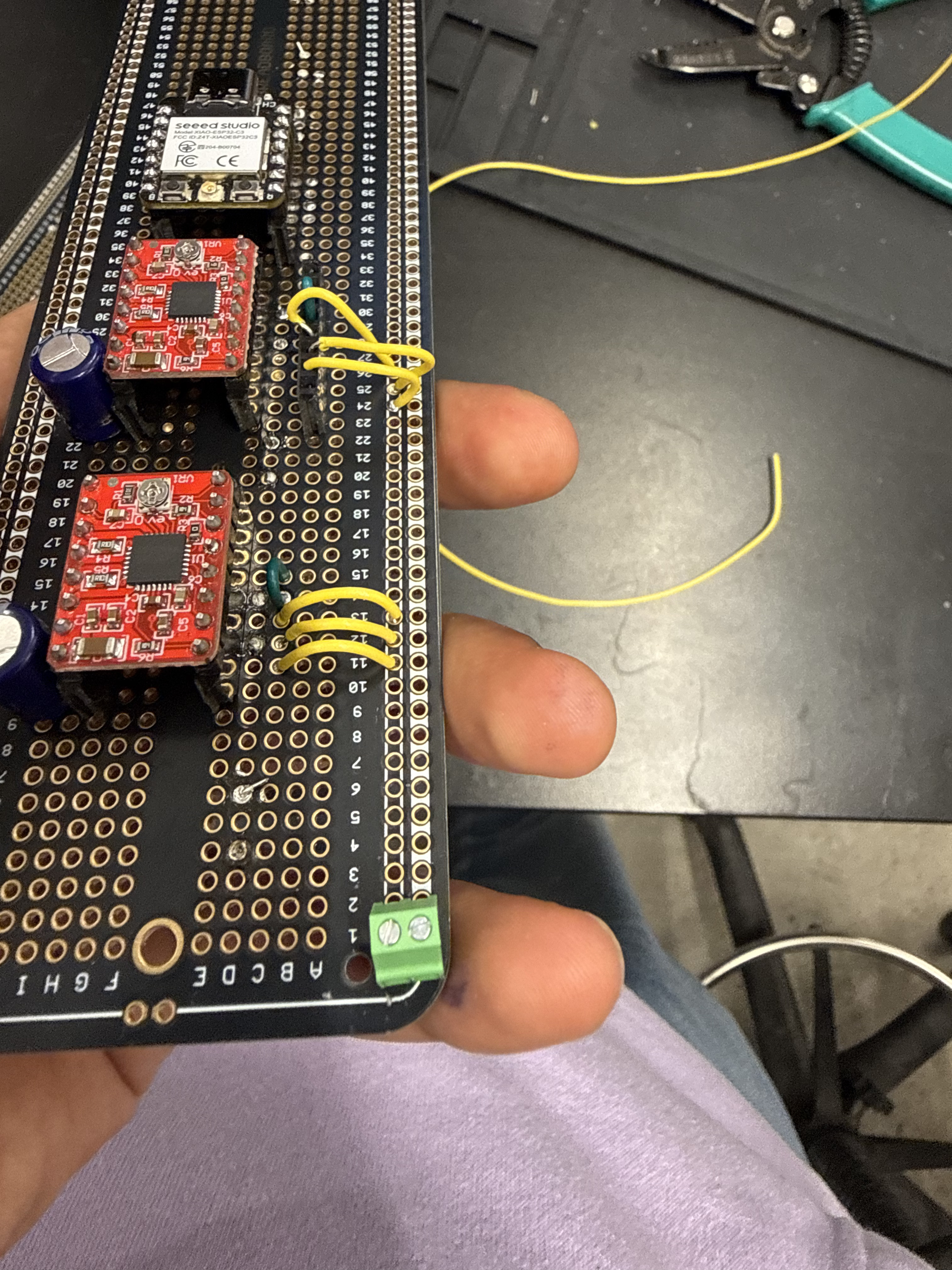
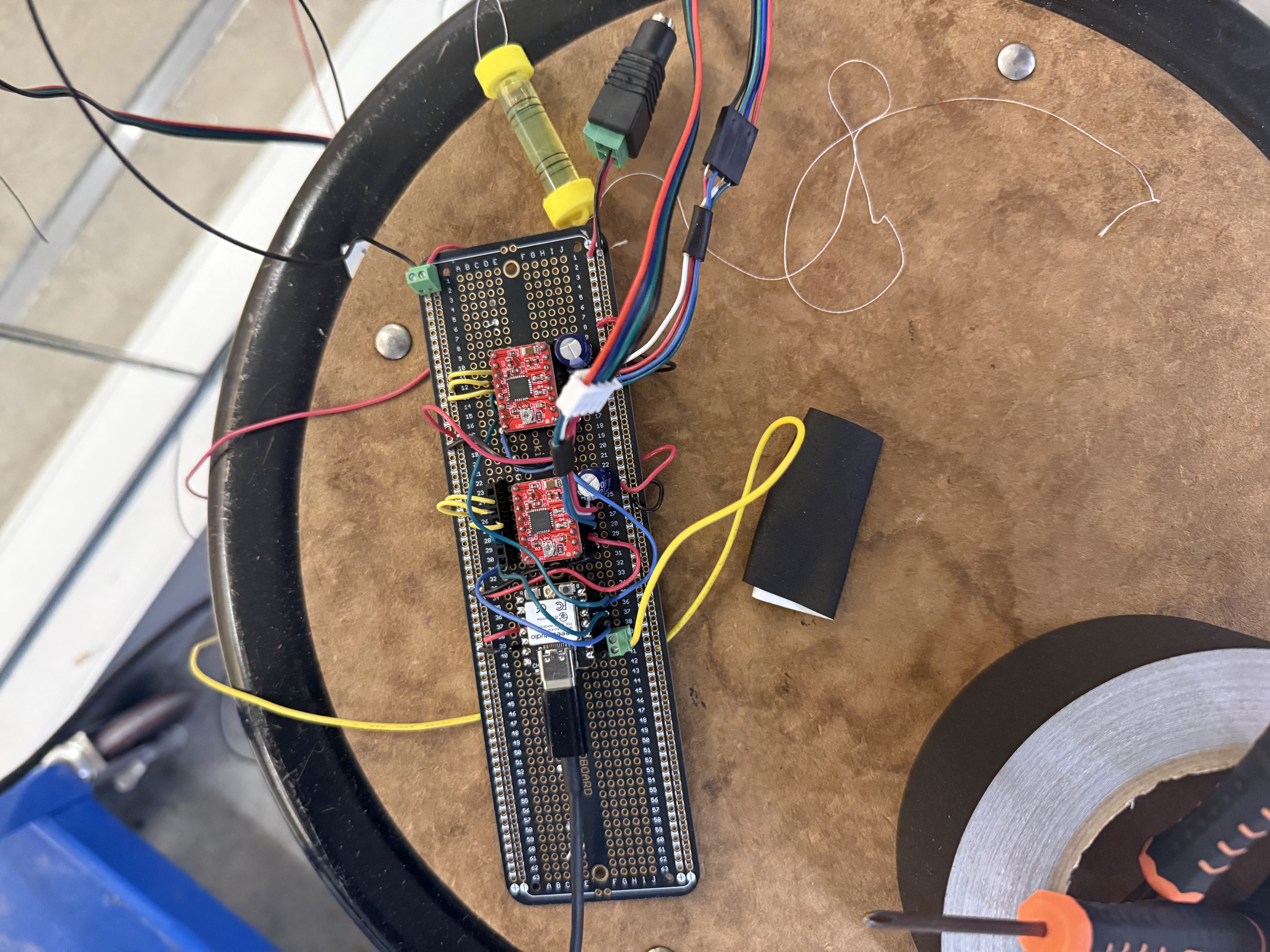


Components Build