Shoutouts
I can't go any further without expressing my gratitude to the PS70 staff that were incredible sources of both emotional and informational support. Victor, Kassia, Bobby, and Jessica were so incredibly helpful throughout the entire project and I am unedingly grateful for their help. Also so grateful to Nathan, Tolu, Emma, and the all the people in the class for making this an amazing semester. The warmth I felt in the class as everyone grinded their projects at absurd times of the night was so beautiful, such an incredible way to end college.
Demo Videos
Here, you see 3 major things. First the toggling servos places under the gears in action. Second the speed variation for the gears, you can observe the gears going through GR 0.33, 1.67, and 0.56 in the video. Finally, an extended run at 0.33 highlighting the top speed. Given the car couldn't move because of the loss of torque through the gears, I would go back and include a version that really magnifies the torque to see if that would drive the car.
Photo Gallery
Big Picture
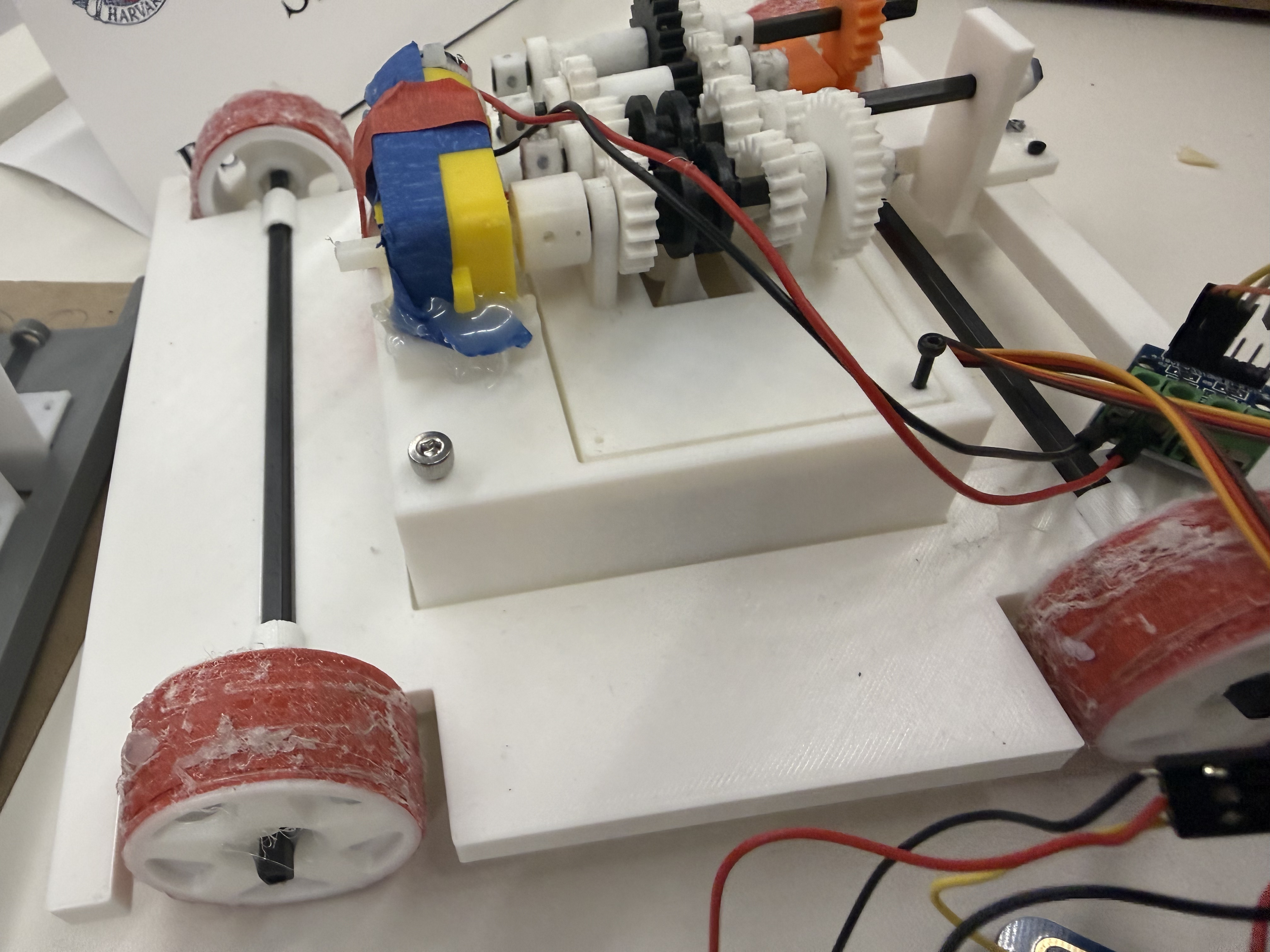
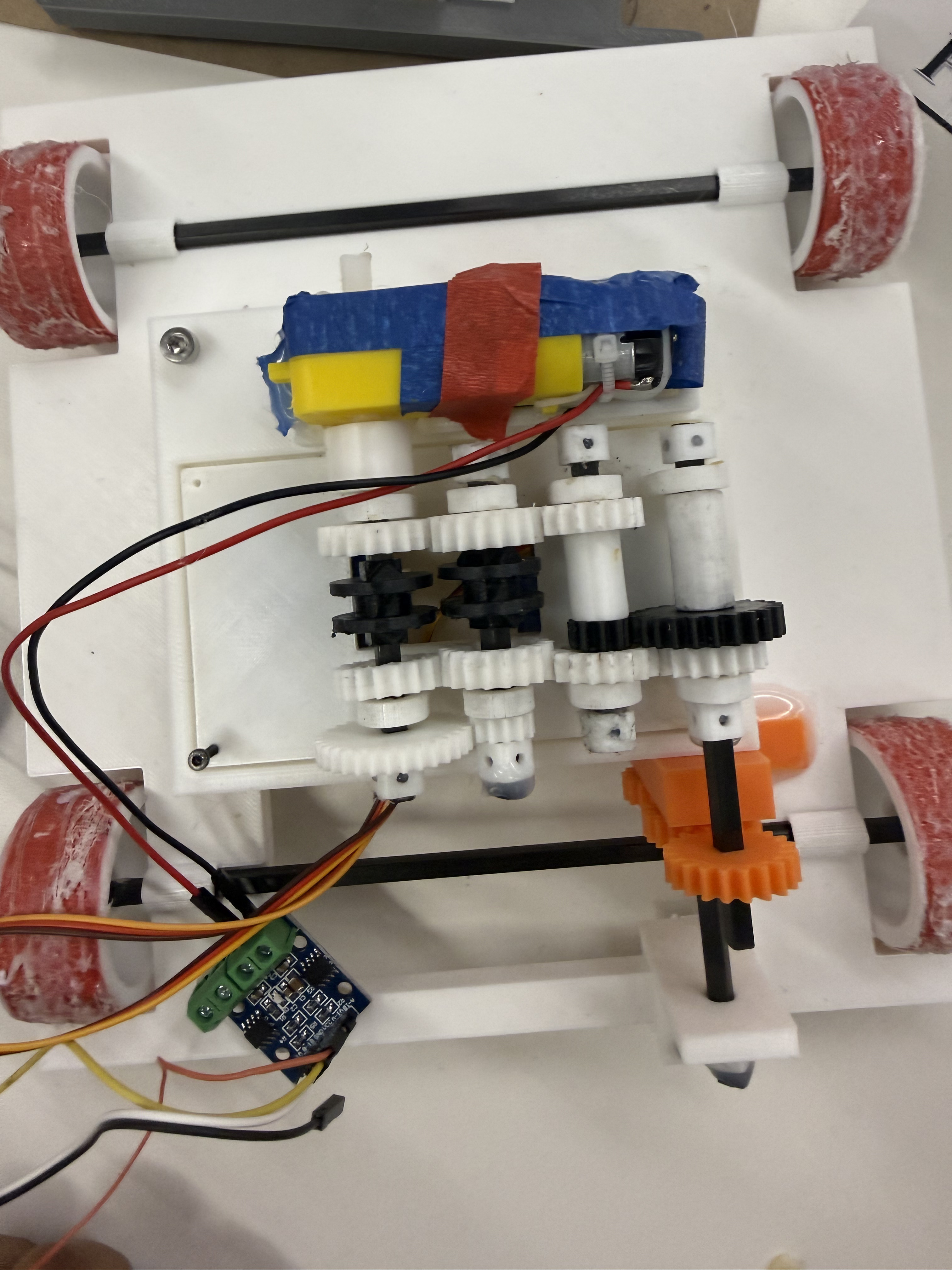
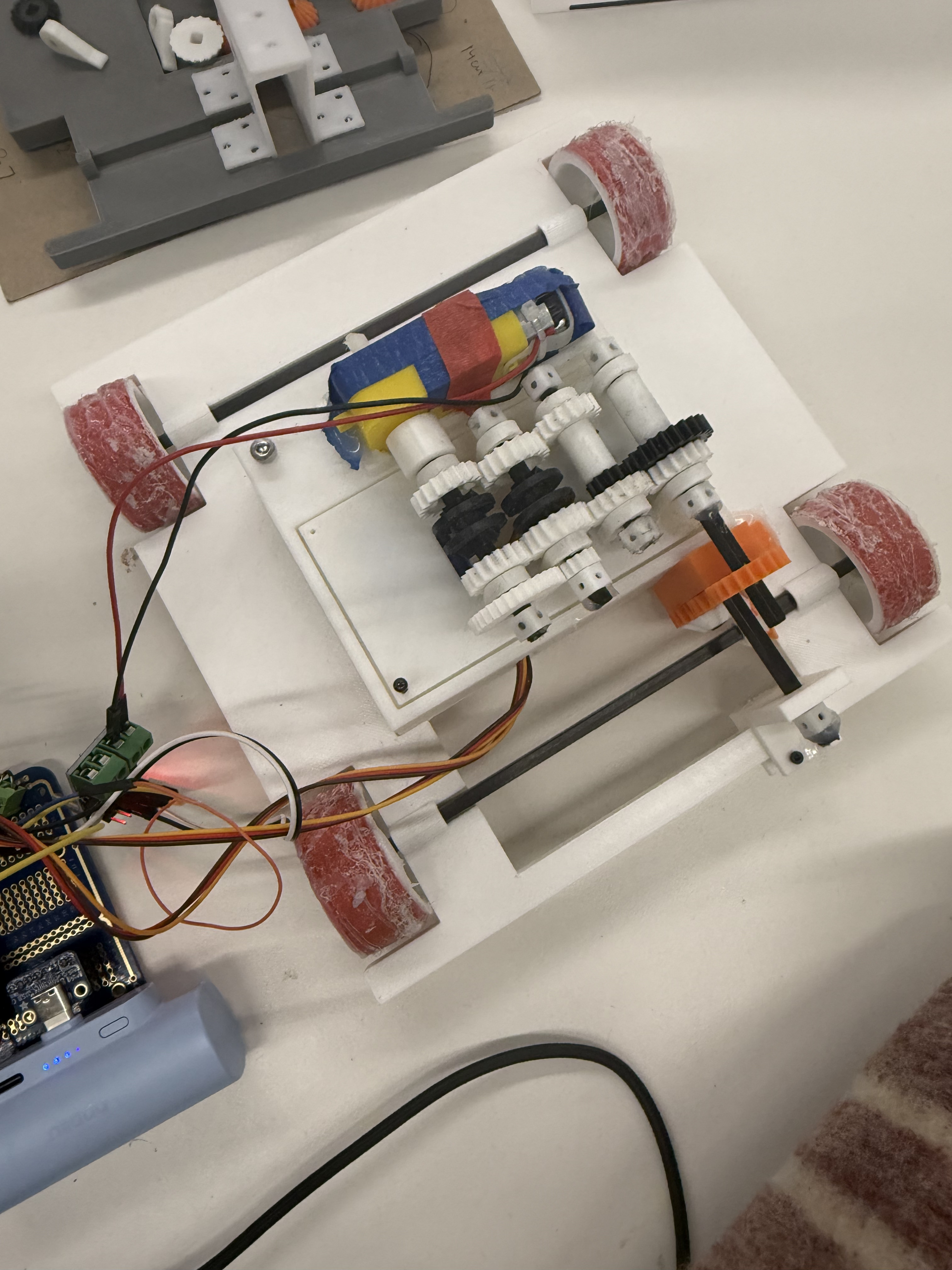
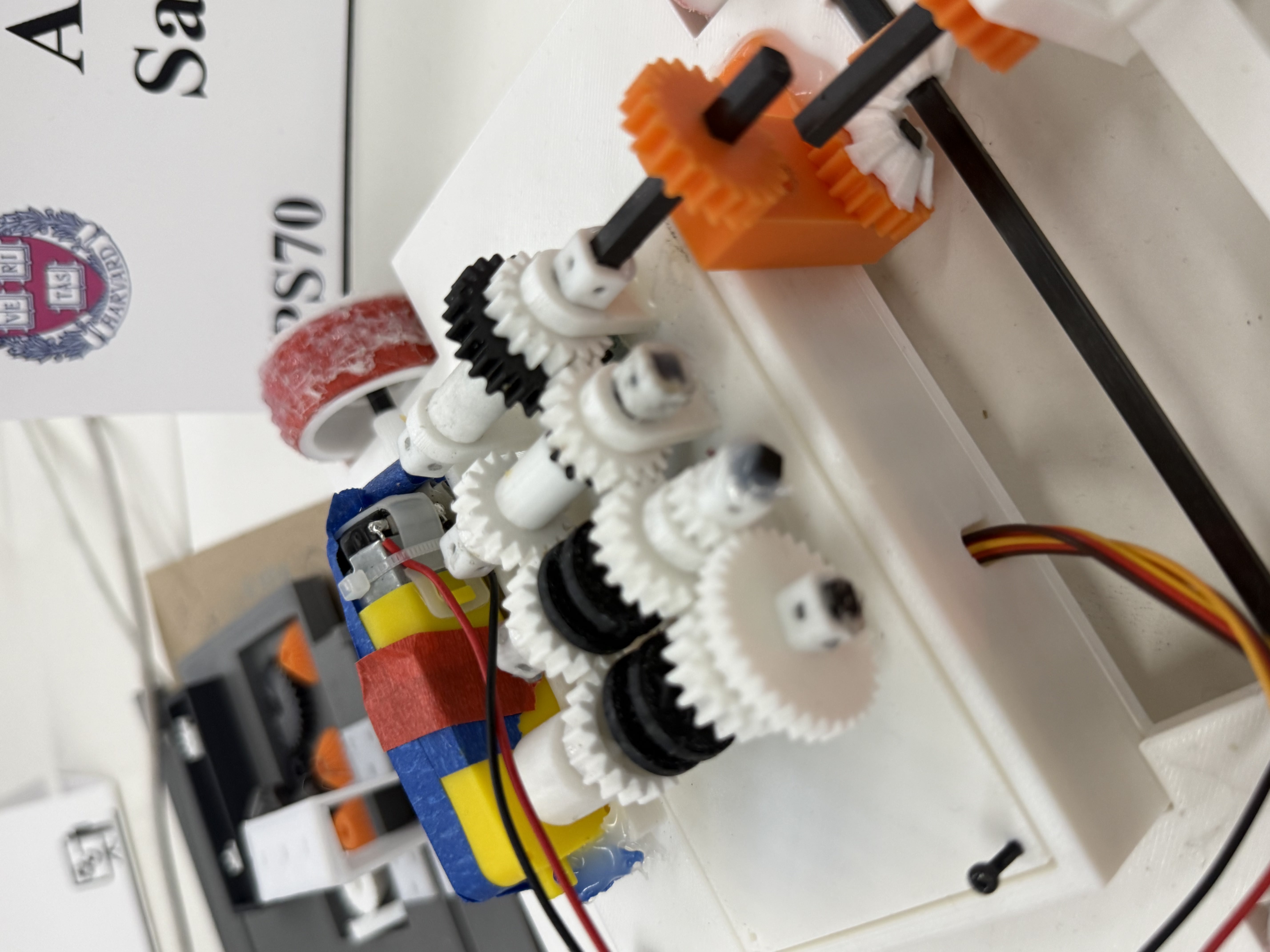
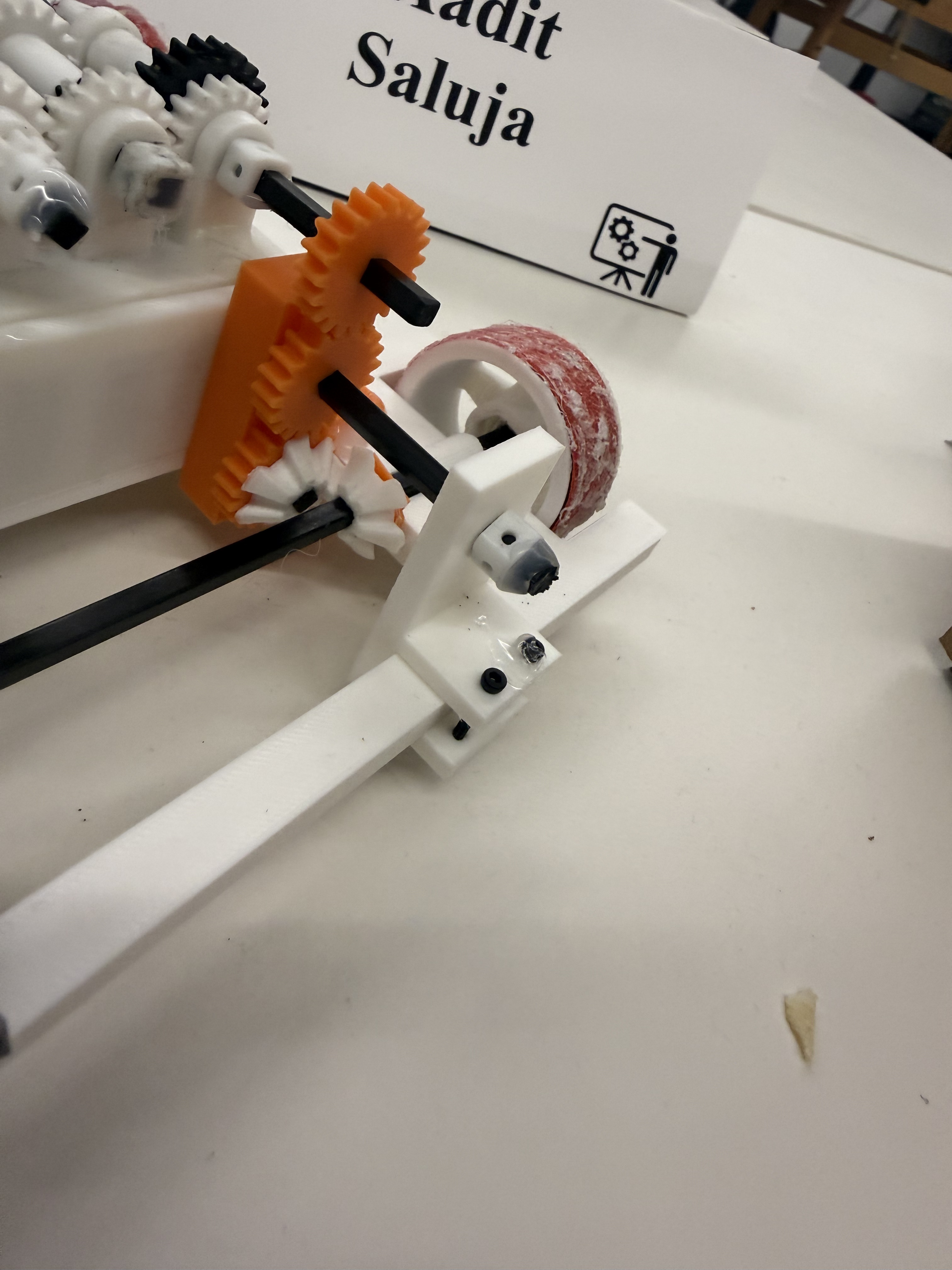
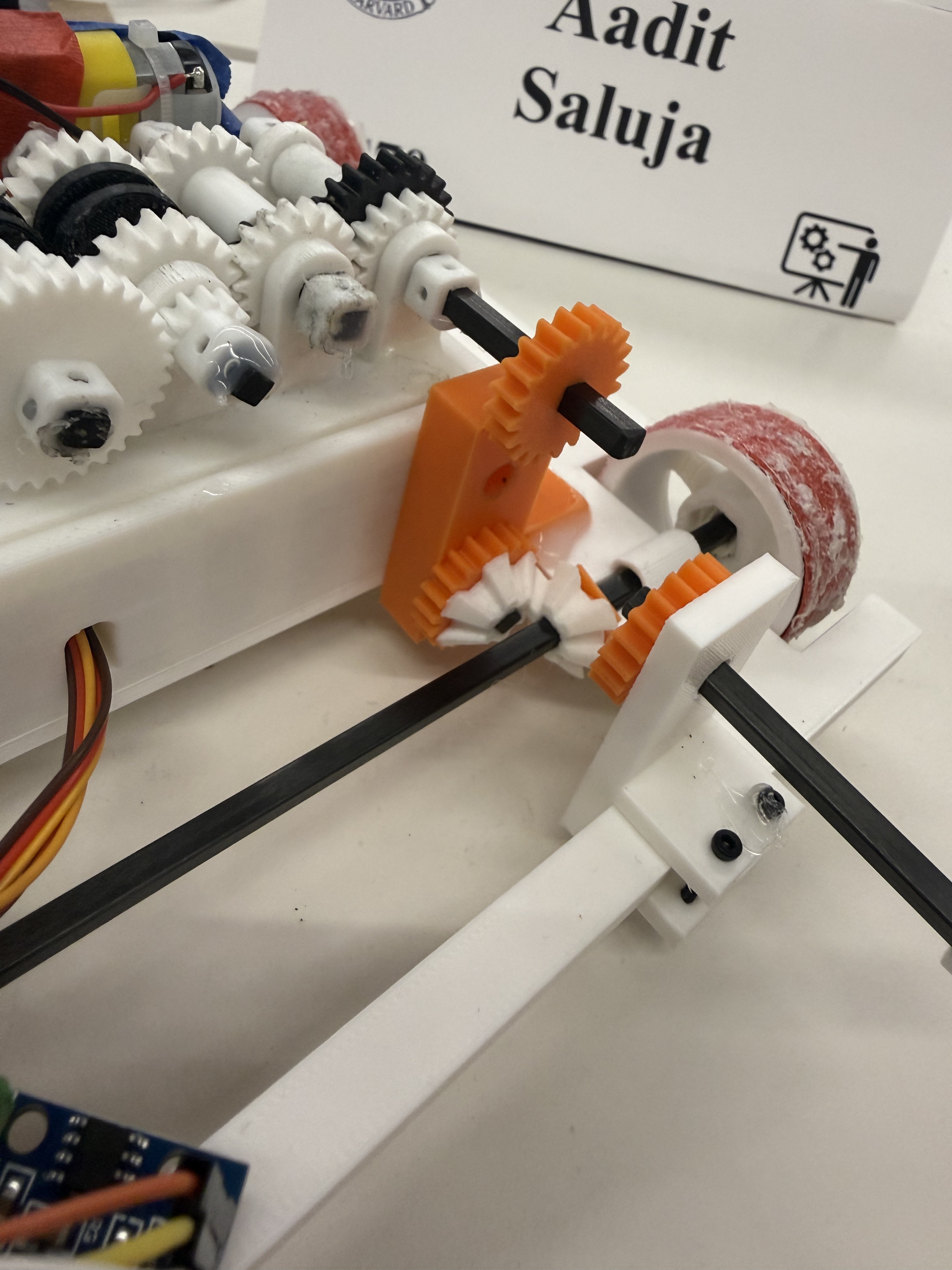
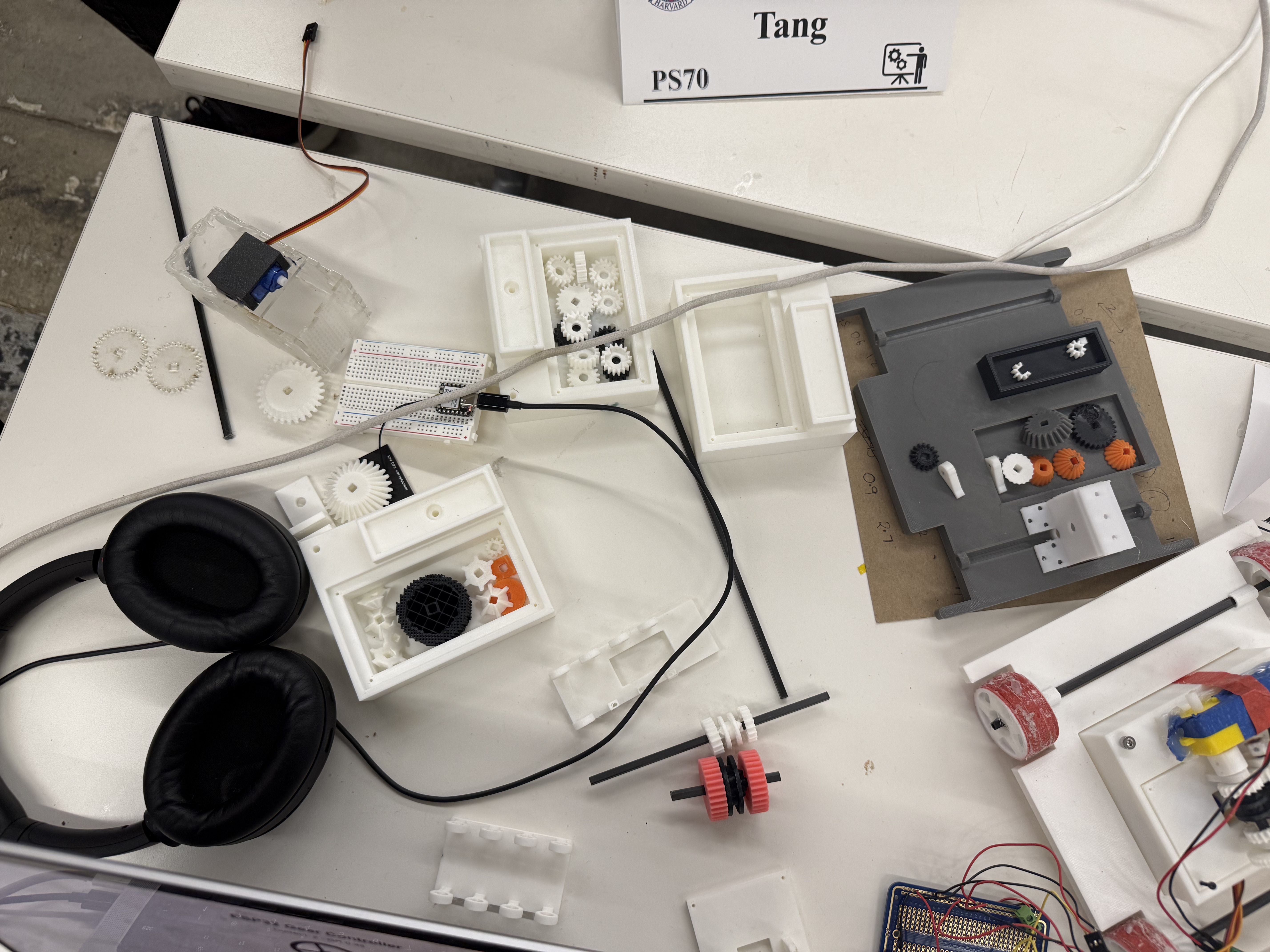
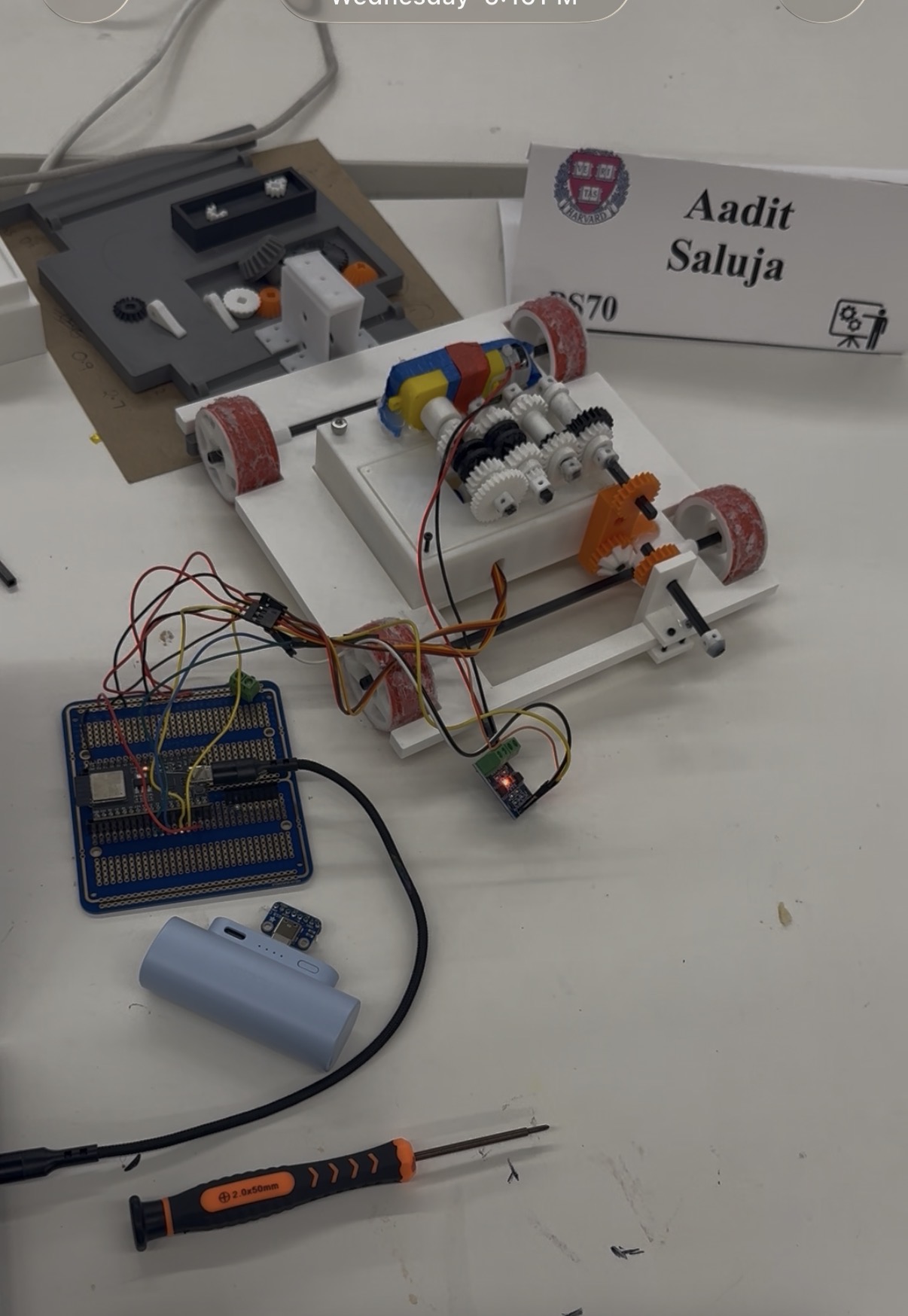
The one thing I was pretty happy about was how the generaly chassis came together. One of things I mentioned in the first week was my wish to build something that comes together smoothly. While it was nto smooth, I was happy to design a chassis and gearbox that I felt wasn't super jank and living off of hot glue. Most of the hot glue here is precautionary haha. Things are press fit and screwed in. I was specially happy at being able to mount the servos neatly right under the gears. Having them be invisible on first glance felt nice. Further, pulling off the 90 degree translation in a decent looking way was both surprising and a source of joy while I was struggling to find a bevel gear design that worked. Overall I ended up with ~12 variations of my spur gears and ~4 variations of the bevel gears.

Zoomed In


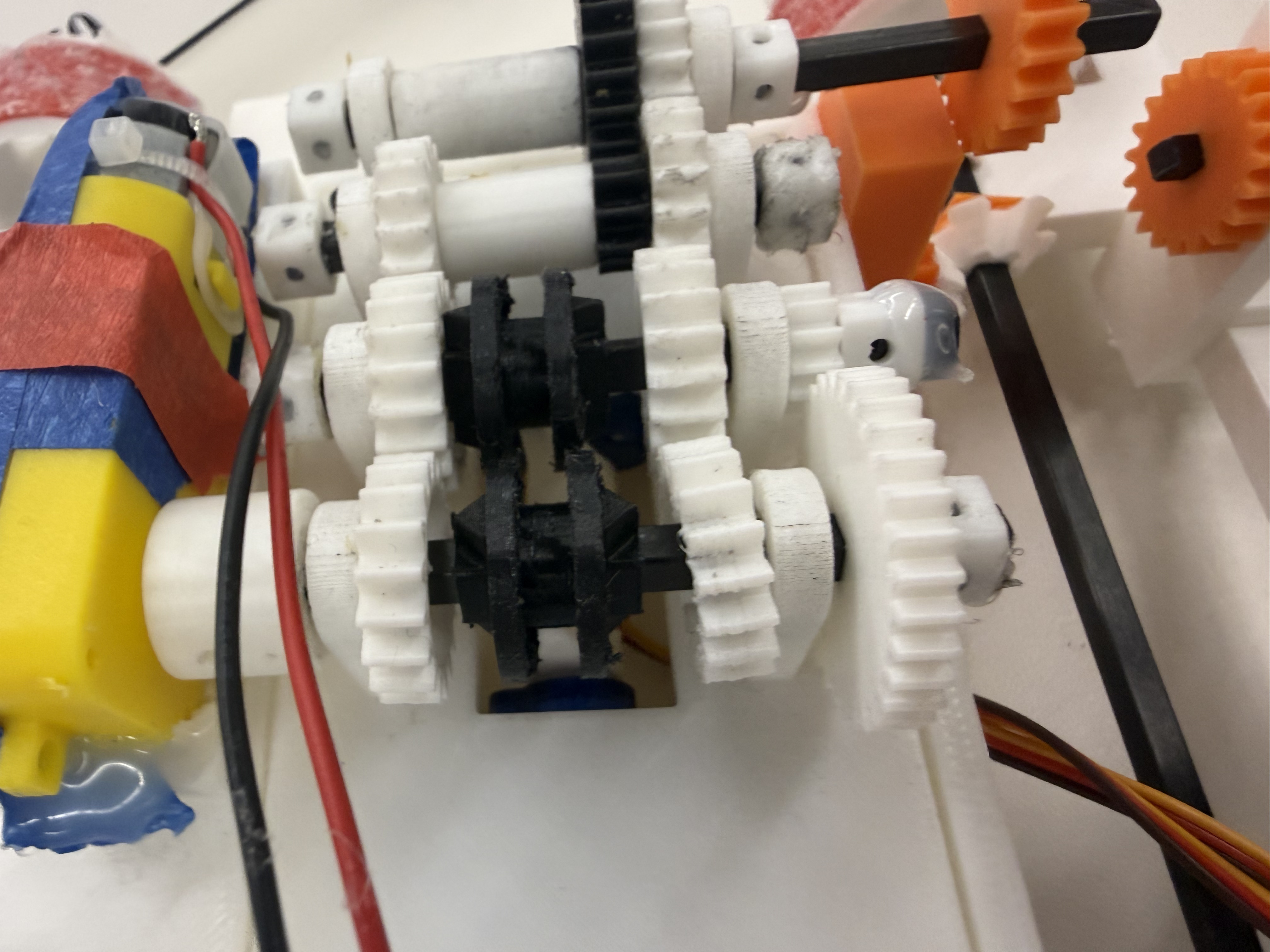
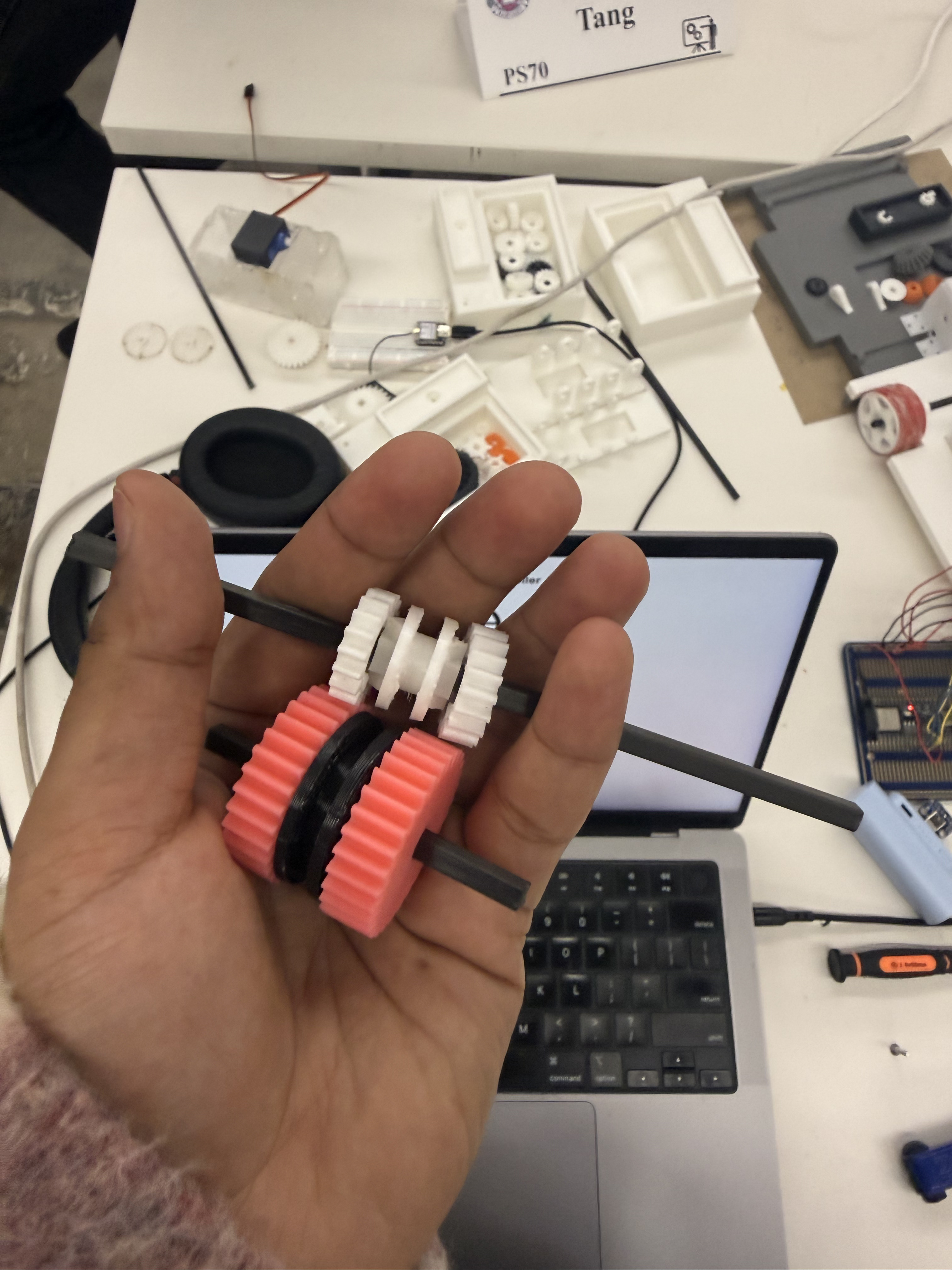
Random but Interesting
An unholy amount of filing and wd40 went into getting the gears moving. The biggest challenge was by far managing the friction and inconsistencies with these very small gears. In the 2 speed MVP, the gears had a lot more room for error. However, here the gears got stuck very regularly and I had to get clever to get the system working. I tried a bunch of structural things. like a very precisely designed gearbox, including a tolerance in the actual gears, varying gear thickness and pitch for the free moving rings, etc. All of these helped but at the end some of the work was also due to lubricating the system, filing some of the edges, and hand carving the gear tolerance. By tolerance, I mean filing the gears very slowly till they start moving like butter (chunky peanut butter in this case).

Takeaways
If I had to buikd this project again, I would first of all not use a dc motor and would like to mill my gears. Or maybe buy moulded gears in the sizes I want. That reliability would have made my life much easier. Further, I would focus on implementing the Ackermann steering because I found it so cool but could never get around to it. Finally, I would invest all my life's savings into buying bearings. So many bearings. So many bushings.
STL Gallery
Code
Receiver
Loading code...Controller
Loading code...